

2017 Vol.30(4)
Display Mode: |
2017, 30(4): 766-781.
doi: 10.1007/s10033-017-0151-z
Abstract:
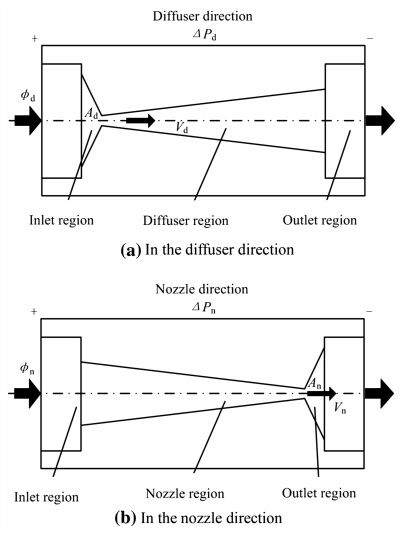
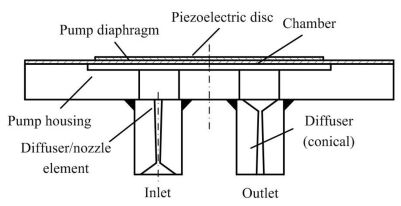
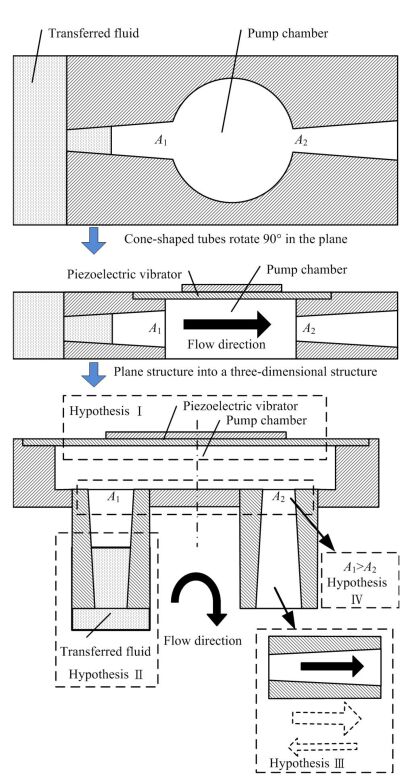
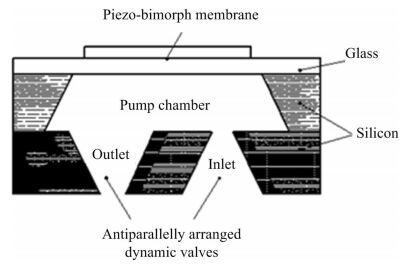
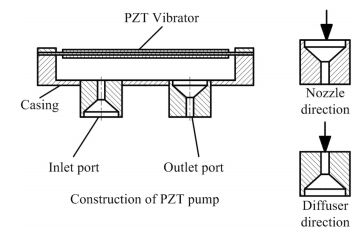
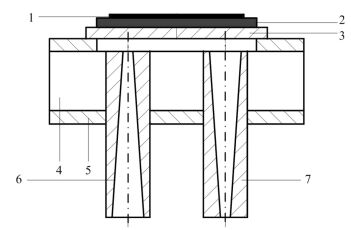
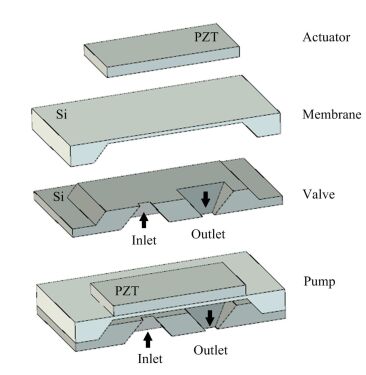
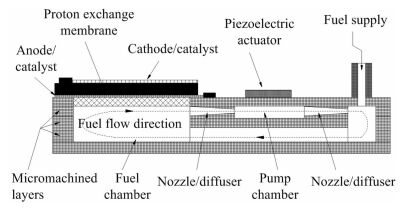
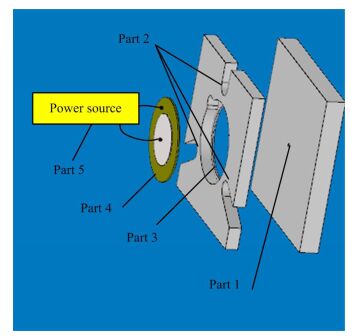
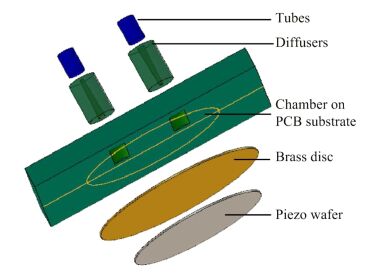
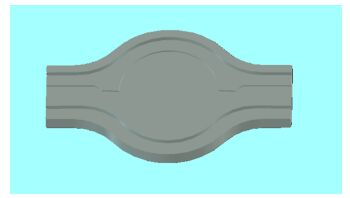
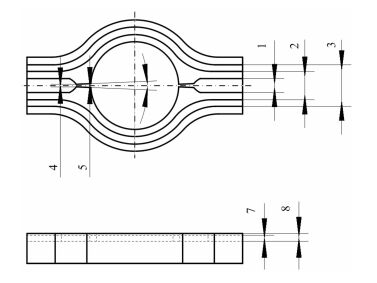
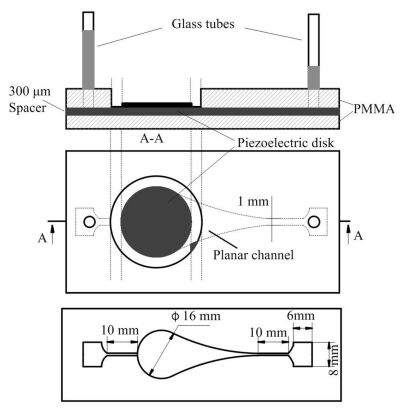
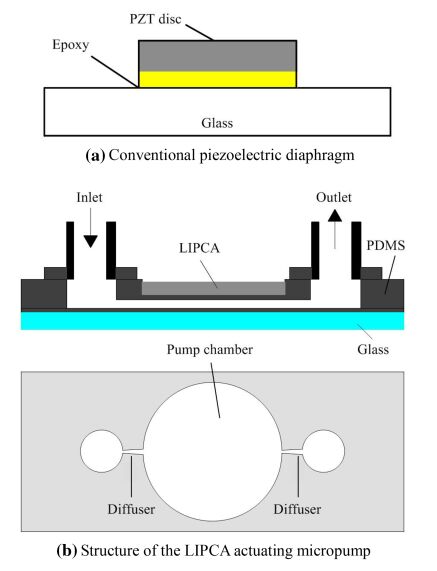
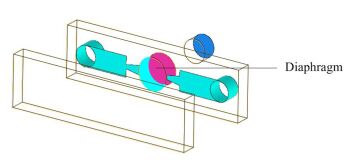
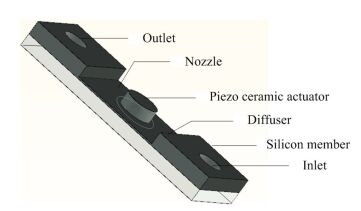
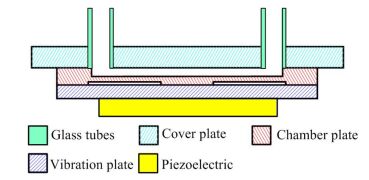
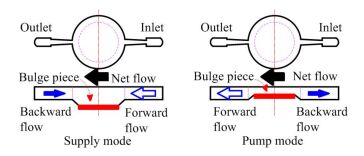
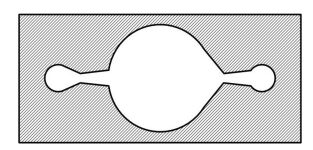
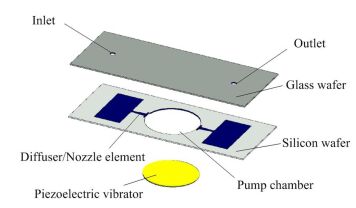
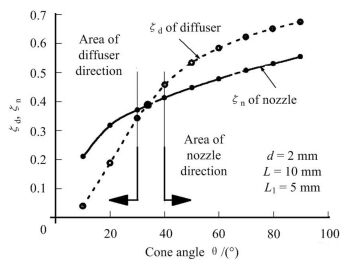
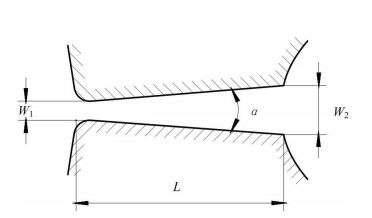
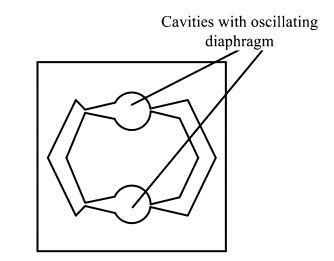
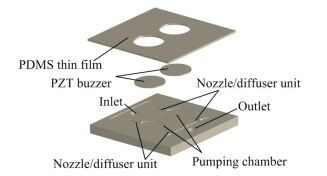
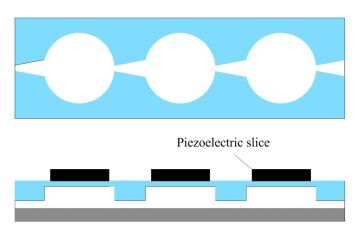
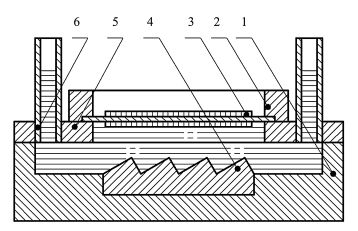
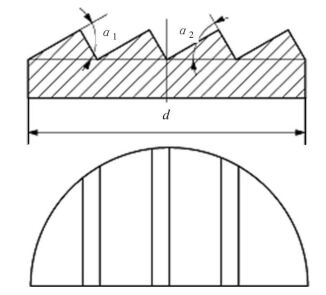
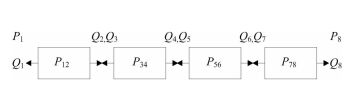
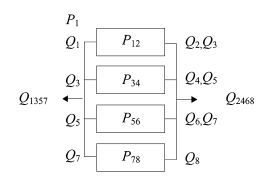
This paper reviews the development of valveless piezoelectric pump with cone-shaped tube chronologically, which have widely potential application in biomedicine and micro-electro-mechanical systems because of its novel principles and deduces the research direction in the future. Firstly, the history of valveless piezoelectric pumps with cone-shaped tubes is reviewed and these pumps are classified into the following types: single pump with solid structure or plane structure, and combined pump with parallel structure or series structure. Furthermore, the function of each type of cone-shaped tubes and pump structures are analyzed, and new directions of potential expansion of valveless piezoelectric pumps with cone-shaped tubes are summarized and deduced. The historical argument, which is provided by the literatures, that for a valveless piezoelectric pump with cone-shaped tubes, cone angle determines the flow resistance and the flow resistance determines the flow direction. The argument is discussed in the reviewed pumps one by one, and proved to be convincing. Finally, it is deduced that bionics is pivotal in the development of valveless piezoelectric pump with cone-shaped tubes from the perspective of evolution of biological structure. This paper summarizes the current valveless piezoelectric pumps with cone-shaped tubes and points out the future development, which may provide guidance for the research of piezoelectric actuators.
This paper reviews the development of valveless piezoelectric pump with cone-shaped tube chronologically, which have widely potential application in biomedicine and micro-electro-mechanical systems because of its novel principles and deduces the research direction in the future. Firstly, the history of valveless piezoelectric pumps with cone-shaped tubes is reviewed and these pumps are classified into the following types: single pump with solid structure or plane structure, and combined pump with parallel structure or series structure. Furthermore, the function of each type of cone-shaped tubes and pump structures are analyzed, and new directions of potential expansion of valveless piezoelectric pumps with cone-shaped tubes are summarized and deduced. The historical argument, which is provided by the literatures, that for a valveless piezoelectric pump with cone-shaped tubes, cone angle determines the flow resistance and the flow resistance determines the flow direction. The argument is discussed in the reviewed pumps one by one, and proved to be convincing. Finally, it is deduced that bionics is pivotal in the development of valveless piezoelectric pump with cone-shaped tubes from the perspective of evolution of biological structure. This paper summarizes the current valveless piezoelectric pumps with cone-shaped tubes and points out the future development, which may provide guidance for the research of piezoelectric actuators.




2017, 30(4): 782-795.
doi: 10.1007/s10033-017-0150-0
Abstract:
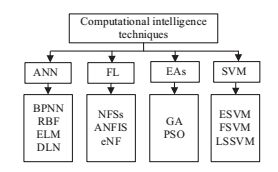
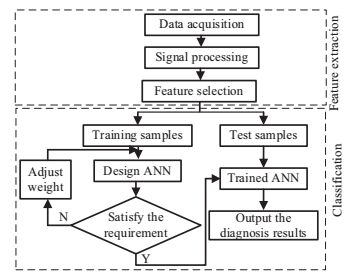
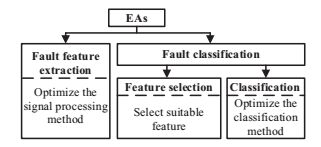
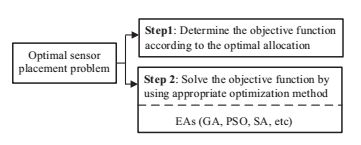
Computational intelligence is one of the most powerful data processing tools to solve complex nonlinear problems, and thus plays a significant role in intelligent fault diagnosis and prediction. However, only few comprehensive reviews have summarized the ongoing efforts of computational intelligence in machinery condition monitoring and fault diagnosis. The recent research and development of computational intelligence techniques in fault diagnosis, prediction and optimal sensor placement are reviewed. The advantages and limitations of computational intelligence techniques in practical applications are discussed. The characteristics of different algorithms are compared, and application situations of these methods are summarized. Computational intelligence methods need to be further studied in deep understanding algorithm mechanism, improving algorithm efficiency and enhancing engineering application. This review may be considered as a useful guidance for researchers in selecting a suitable method for a specific situation and pointing out potential research directions.
Computational intelligence is one of the most powerful data processing tools to solve complex nonlinear problems, and thus plays a significant role in intelligent fault diagnosis and prediction. However, only few comprehensive reviews have summarized the ongoing efforts of computational intelligence in machinery condition monitoring and fault diagnosis. The recent research and development of computational intelligence techniques in fault diagnosis, prediction and optimal sensor placement are reviewed. The advantages and limitations of computational intelligence techniques in practical applications are discussed. The characteristics of different algorithms are compared, and application situations of these methods are summarized. Computational intelligence methods need to be further studied in deep understanding algorithm mechanism, improving algorithm efficiency and enhancing engineering application. This review may be considered as a useful guidance for researchers in selecting a suitable method for a specific situation and pointing out potential research directions.
2017, 30(4): 796-803.
doi: 10.1007/s10033-017-0096-2
Abstract:
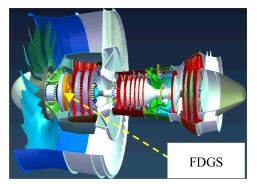
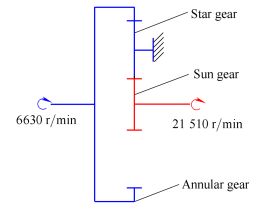
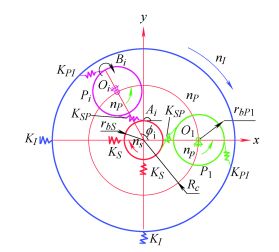
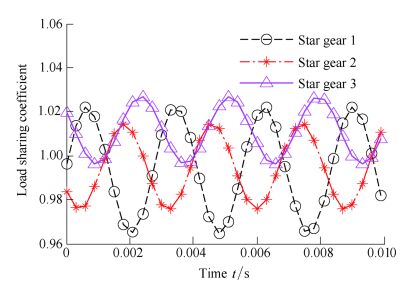
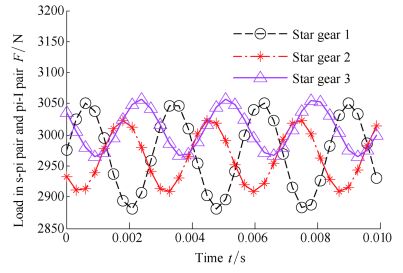
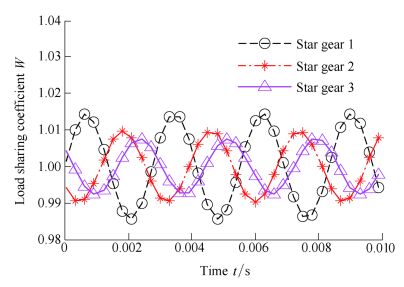
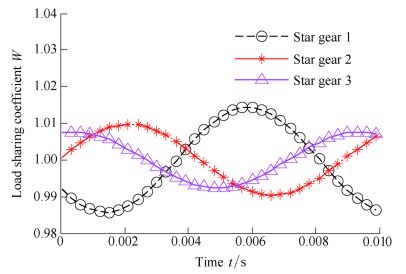
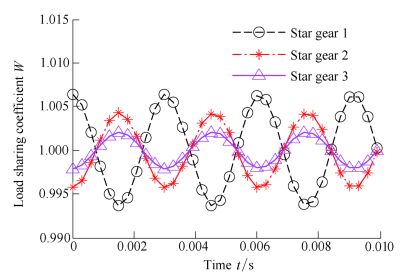
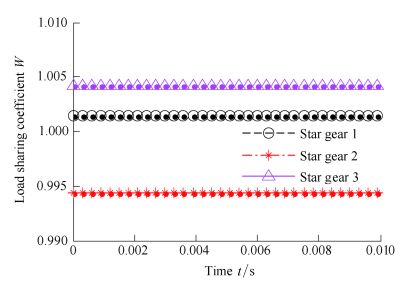
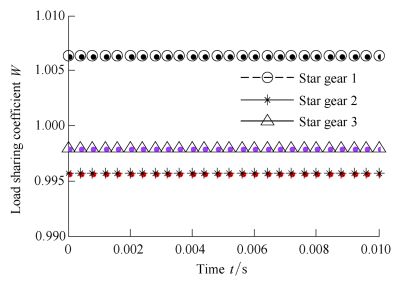
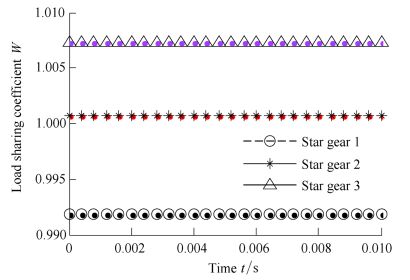
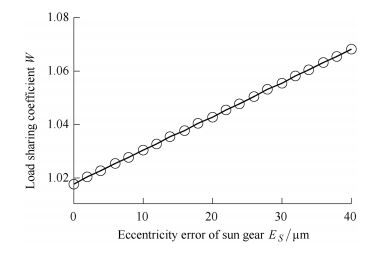
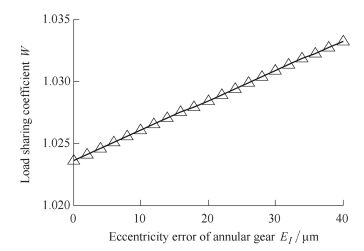
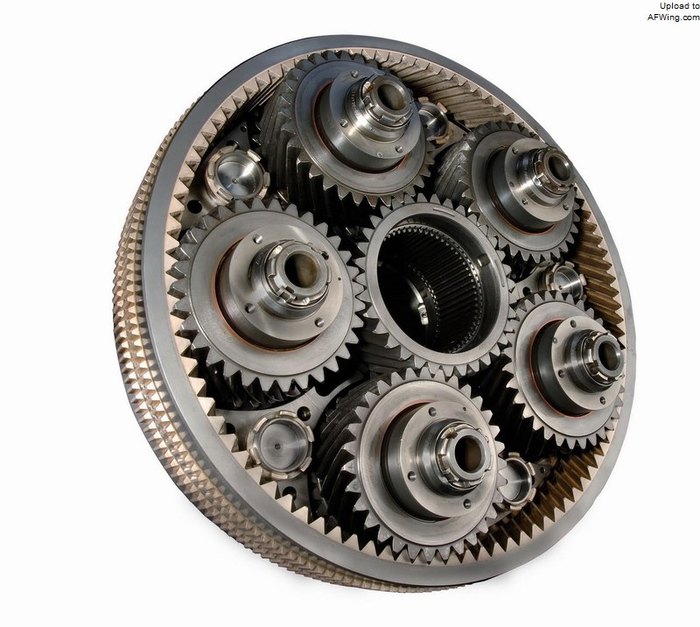
Load sharing behavior is very important for power-split gearing system, star gearing reducer as a new type and special transmission system can be used in many industry fields. However, there is few literature regarding the key multiple-split load sharing issue in main gearbox used in new type geared turbofan engine. Further mechanism analysis are made on load sharing behavior among star gears of star gearing reducer for geared turbofan engine. Comprehensive meshing error analysis are conducted on eccentricity error, gear thickness error, base pitch error, assembly error, and bearing error of star gearing reducer respectively. Floating meshing error resulting from meshing clearance variation caused by the simultaneous floating of sun gear and annular gear are taken into account. A refined mathematical model for load sharing coefficient calculation is established in consideration of different meshing stiffness and supporting stiffness for components. The regular curves of load sharing coefficient under the influence of interactions, single action and single variation of various component errors are obtained. The accurate sensitivity of load sharing coefficient toward different errors is mastered. The load sharing coefficient of star gearing reducer is 1.033 and the maximum meshing force in gear tooth is about 3010 N. This paper provides scientific theory evidences for optimal parameter design and proper tolerance distribution in advanced development and manufacturing process, so as to achieve optimal effects in economy and technology.
Load sharing behavior is very important for power-split gearing system, star gearing reducer as a new type and special transmission system can be used in many industry fields. However, there is few literature regarding the key multiple-split load sharing issue in main gearbox used in new type geared turbofan engine. Further mechanism analysis are made on load sharing behavior among star gears of star gearing reducer for geared turbofan engine. Comprehensive meshing error analysis are conducted on eccentricity error, gear thickness error, base pitch error, assembly error, and bearing error of star gearing reducer respectively. Floating meshing error resulting from meshing clearance variation caused by the simultaneous floating of sun gear and annular gear are taken into account. A refined mathematical model for load sharing coefficient calculation is established in consideration of different meshing stiffness and supporting stiffness for components. The regular curves of load sharing coefficient under the influence of interactions, single action and single variation of various component errors are obtained. The accurate sensitivity of load sharing coefficient toward different errors is mastered. The load sharing coefficient of star gearing reducer is 1.033 and the maximum meshing force in gear tooth is about 3010 N. This paper provides scientific theory evidences for optimal parameter design and proper tolerance distribution in advanced development and manufacturing process, so as to achieve optimal effects in economy and technology.


2017, 30(4): 804-818.
doi: 10.1007/s10033-017-0145-x
Abstract:
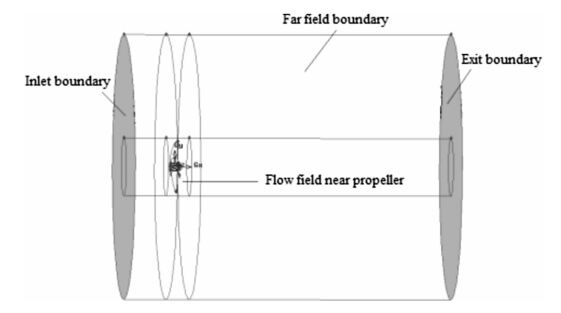
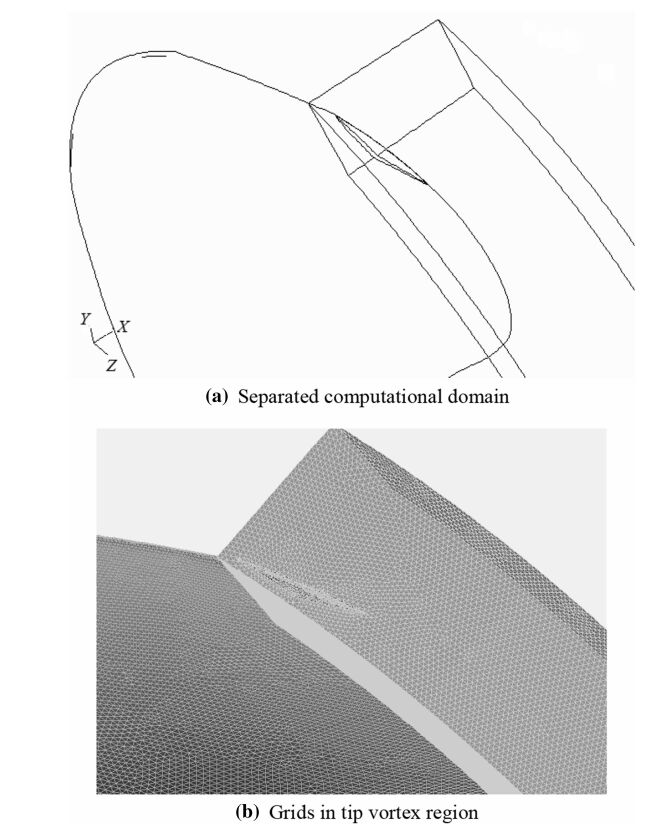
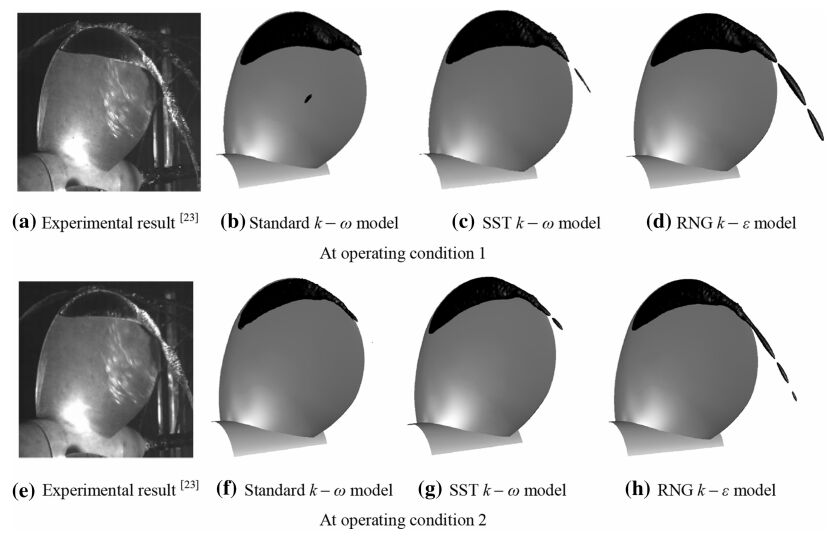
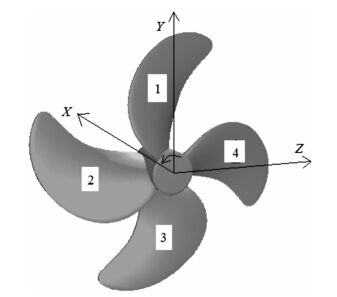
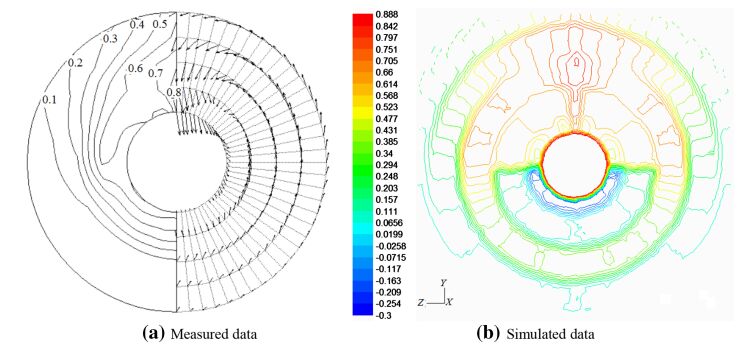
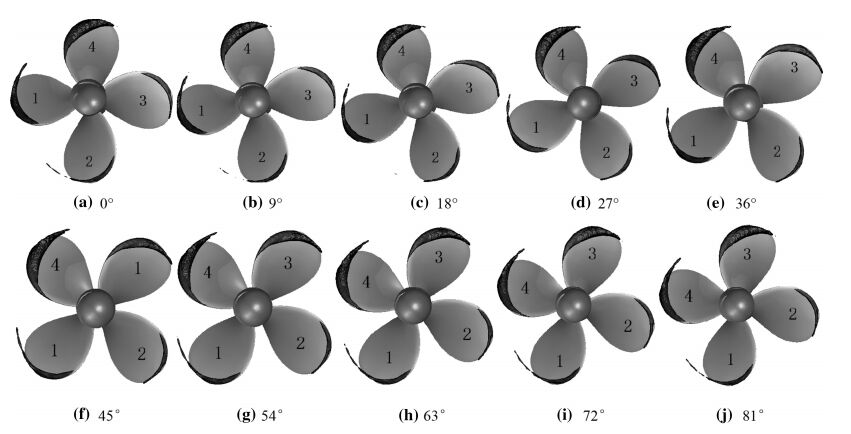
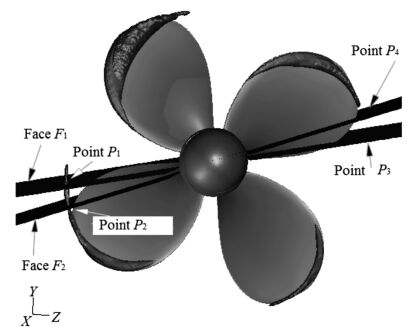
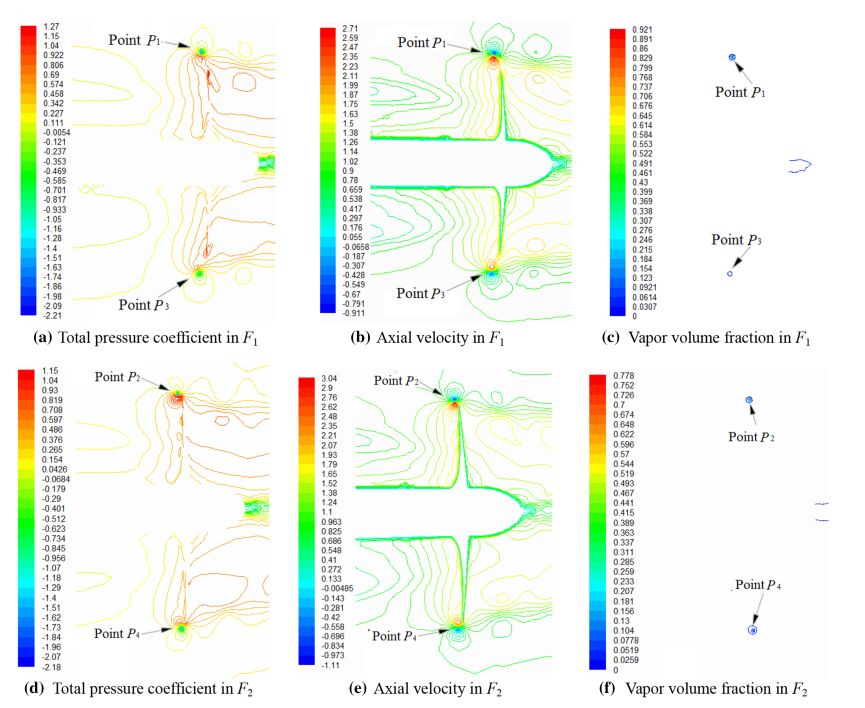
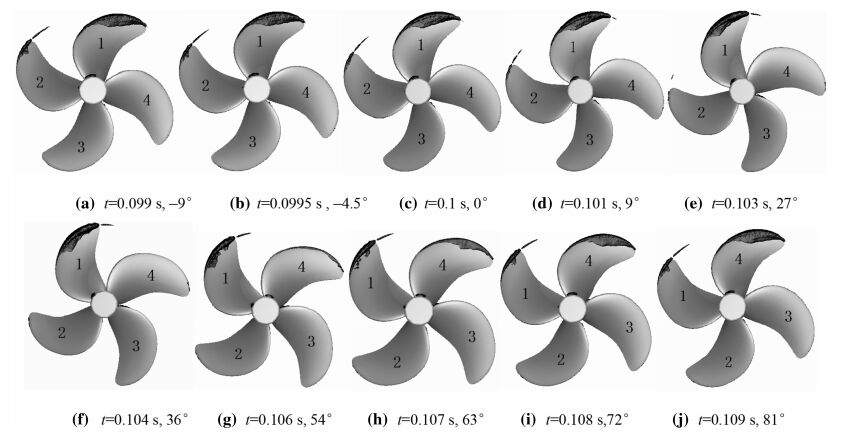
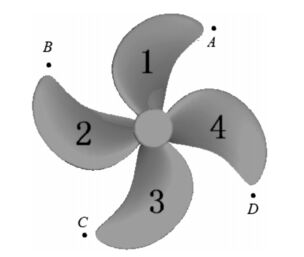
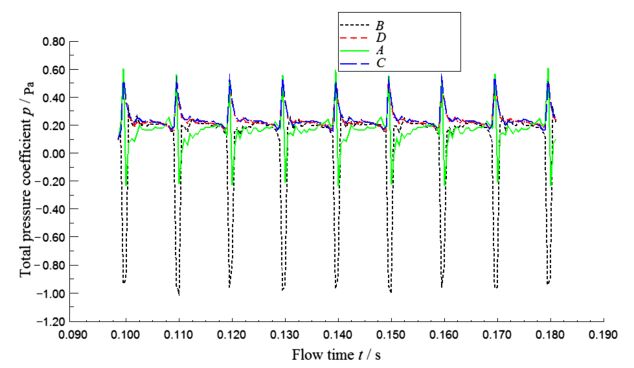
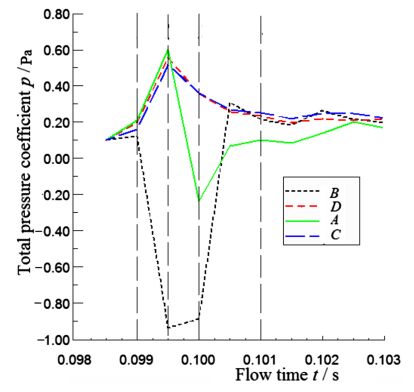
Tip vortex cavitation is the first type of cavitation to take place around most marine propellers. But the numerical prediction of tip vortex cavitation is one of the challenges for propeller wake because of turbulence dissipation during the numerical simulation. Several parameters of computational mesh and numerical algorithm are tested by mean of the predicted length of tip vortex cavtiation to validate a developed method. The predicted length of tip vortex cavtiation is on the increase about 0.4 propeller diameters using the developed numerical method. The predicted length of tip vortex cavtiation by RNG k - ε model is about 3 times of that by SST k - ω model. Therefore, based on the validation of the present approach, the cavitating flows generated by two rotating propellers under a non-uniform inflow are calculated further. The distributions of axial velocity, total pressure and vapor volume fraction in the transversal planes across tip vortex region are shown to be useful in analyzing the feature of the cavitating flow. The strongest kernel of tip vortex cavitation is not at the position most close to blade tip but slightly far away from the region. During the growth of tip vortex cavitation extension, it appears short and thick, and then it becomes long and thin. The pressure fluctuations at the positions inside tip vortex region also validates the conclusion. A key finding of the study is that the grids constructed especially for tip vortex flows by using separated computational domain is capable of decreasing the turbulence dissipation and correctly capturing the feature of propeller tip vortex cavitation under uniform and non-uniform inflows. The turbulence model and advanced grids is important to predict tip vortex cavitation.
Tip vortex cavitation is the first type of cavitation to take place around most marine propellers. But the numerical prediction of tip vortex cavitation is one of the challenges for propeller wake because of turbulence dissipation during the numerical simulation. Several parameters of computational mesh and numerical algorithm are tested by mean of the predicted length of tip vortex cavtiation to validate a developed method. The predicted length of tip vortex cavtiation is on the increase about 0.4 propeller diameters using the developed numerical method. The predicted length of tip vortex cavtiation by RNG k - ε model is about 3 times of that by SST k - ω model. Therefore, based on the validation of the present approach, the cavitating flows generated by two rotating propellers under a non-uniform inflow are calculated further. The distributions of axial velocity, total pressure and vapor volume fraction in the transversal planes across tip vortex region are shown to be useful in analyzing the feature of the cavitating flow. The strongest kernel of tip vortex cavitation is not at the position most close to blade tip but slightly far away from the region. During the growth of tip vortex cavitation extension, it appears short and thick, and then it becomes long and thin. The pressure fluctuations at the positions inside tip vortex region also validates the conclusion. A key finding of the study is that the grids constructed especially for tip vortex flows by using separated computational domain is capable of decreasing the turbulence dissipation and correctly capturing the feature of propeller tip vortex cavitation under uniform and non-uniform inflows. The turbulence model and advanced grids is important to predict tip vortex cavitation.

2017, 30(4): 819-828.
doi: 10.1007/s10033-017-0147-8
Abstract:
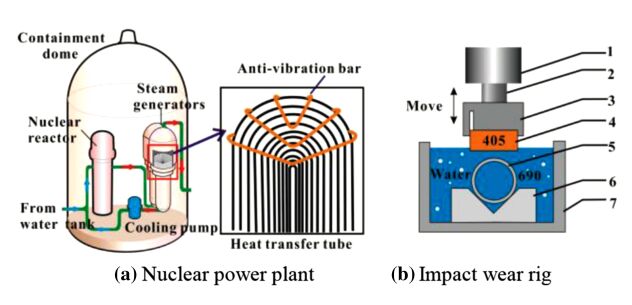
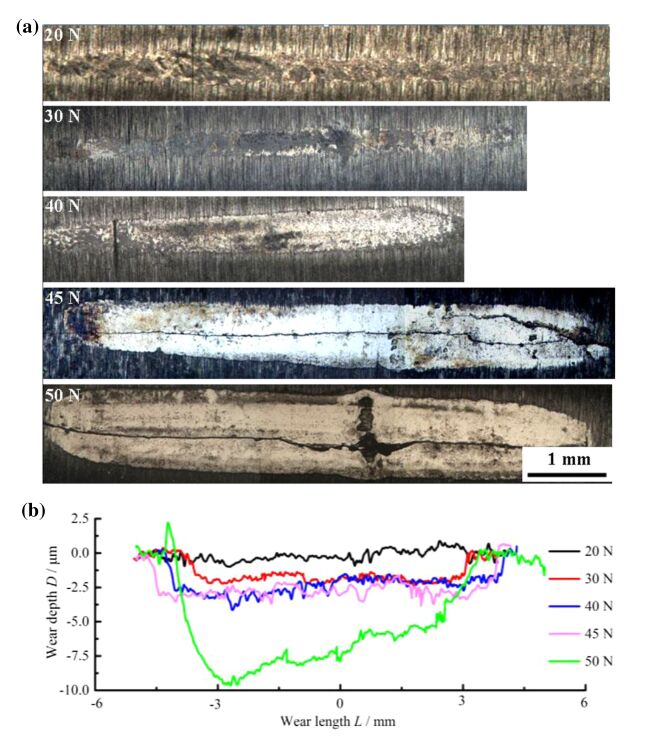
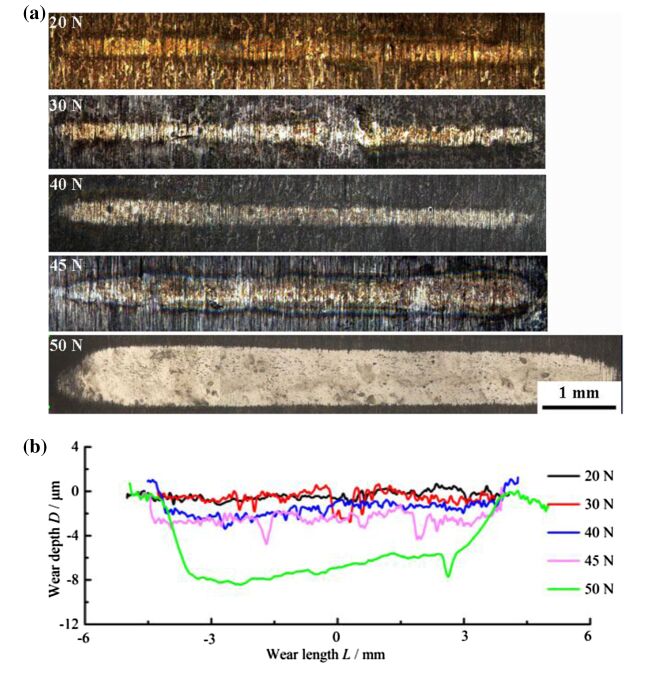
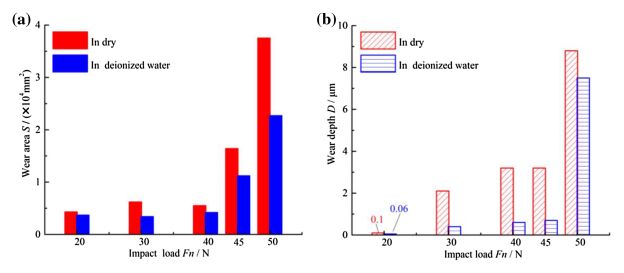
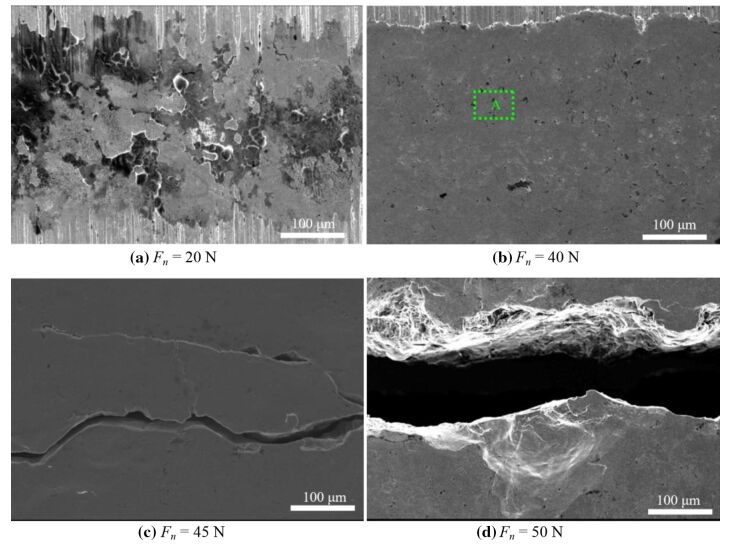
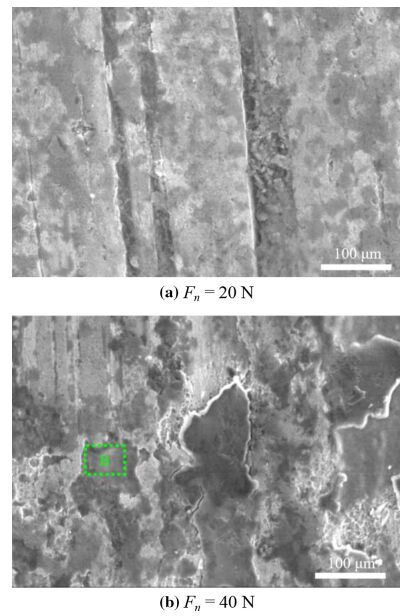
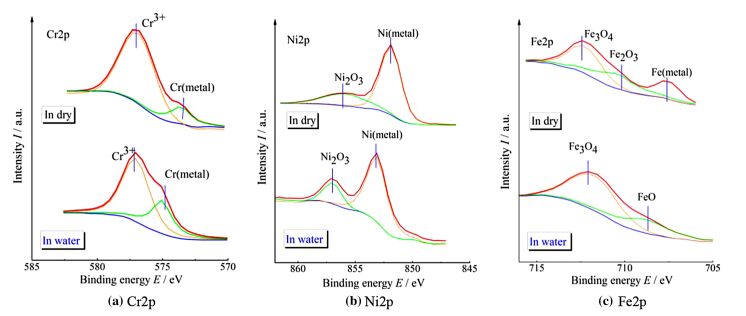
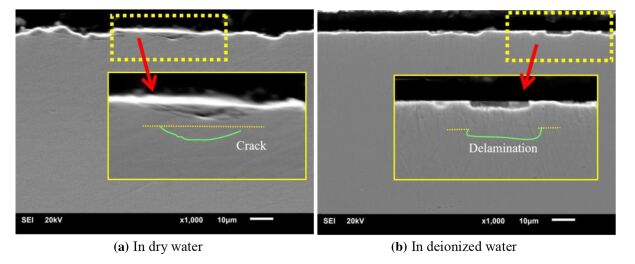
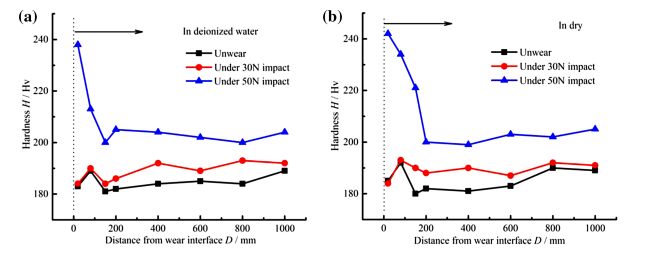
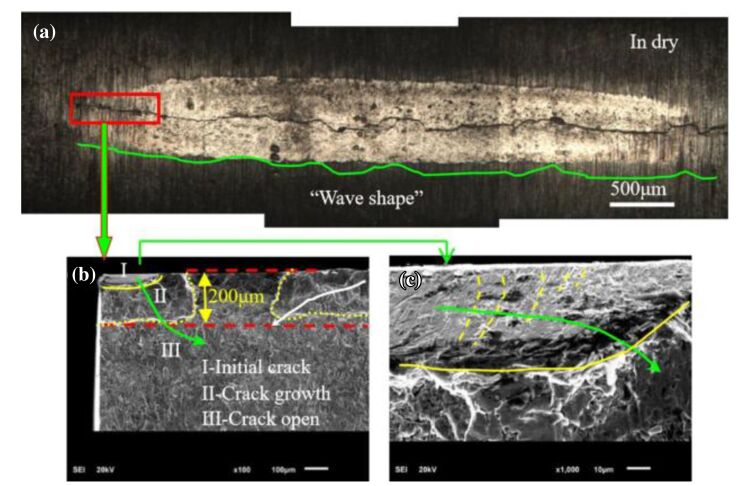
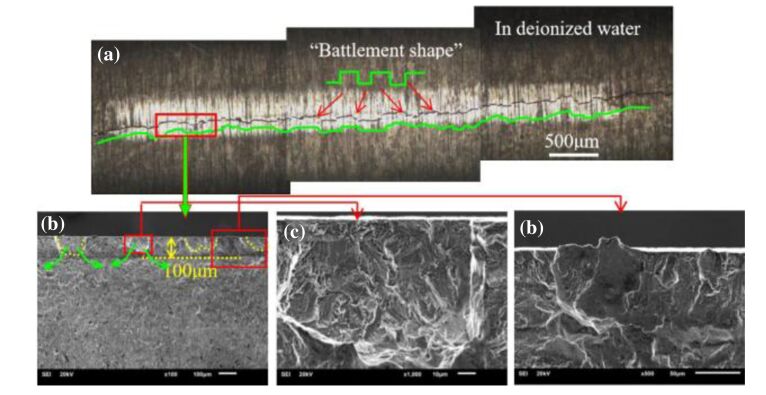
The impact fretting wear has largely occurred at nuclear power device induced by the flow-induced vibration, and it will take potential hazards to the service of the equipment. However, the present study focuses on the tangential fretting wear of alloy 690 tubes. Research on impact fretting wear of alloy 690 tubes is limited and the related research is imminent. Therefore, impact fretting wear behavior of alloy 690 tubes against 304 stainless steels is investigated. Deionized water is used to simulate the flow environment of the equipment, and the dry environment is used for comparison. Varied analytical techniques are employed to characterize the wear and tribochemical behavior during impact fretting wear. Characterization results indicate that cracks occur at high impact load in both water and dry equipment; however, the water as a medium can significantly delay the cracking time. The crack propagation behavior shows a jagged shape in the water, but crack extended disorderly in dry equipment because the water changed the stress distribution and retarded the friction heat during the wear process. The SEM and XPS analysis shows that the main failure mechanisms of the tube under impact fretting are fatigue wear and friction oxidation. The effect of medium(water) on fretting wear is revealed, which plays a potential and promising role in the service of nuclear power device and other flow equipments.
The impact fretting wear has largely occurred at nuclear power device induced by the flow-induced vibration, and it will take potential hazards to the service of the equipment. However, the present study focuses on the tangential fretting wear of alloy 690 tubes. Research on impact fretting wear of alloy 690 tubes is limited and the related research is imminent. Therefore, impact fretting wear behavior of alloy 690 tubes against 304 stainless steels is investigated. Deionized water is used to simulate the flow environment of the equipment, and the dry environment is used for comparison. Varied analytical techniques are employed to characterize the wear and tribochemical behavior during impact fretting wear. Characterization results indicate that cracks occur at high impact load in both water and dry equipment; however, the water as a medium can significantly delay the cracking time. The crack propagation behavior shows a jagged shape in the water, but crack extended disorderly in dry equipment because the water changed the stress distribution and retarded the friction heat during the wear process. The SEM and XPS analysis shows that the main failure mechanisms of the tube under impact fretting are fatigue wear and friction oxidation. The effect of medium(water) on fretting wear is revealed, which plays a potential and promising role in the service of nuclear power device and other flow equipments.

2017, 30(4): 829-842.
doi: 10.1007/s10033-017-0153-x
Abstract:
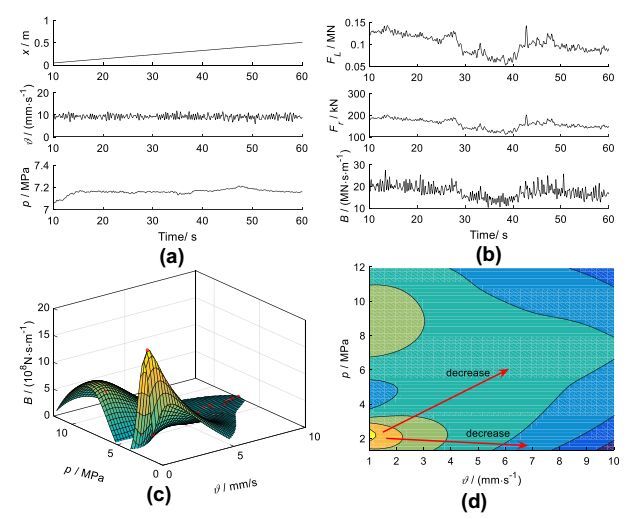
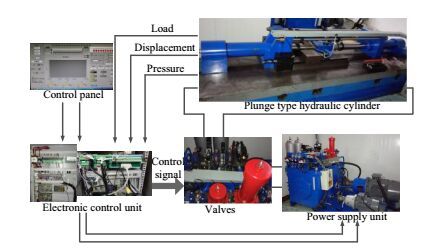
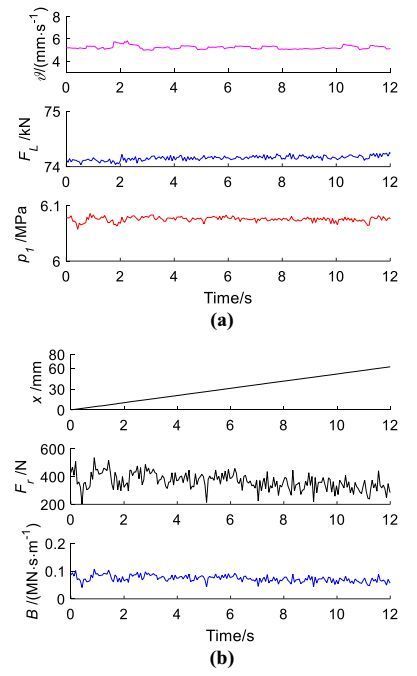
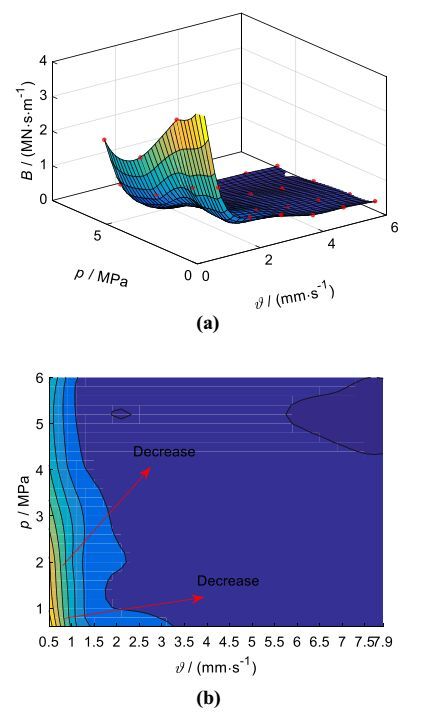
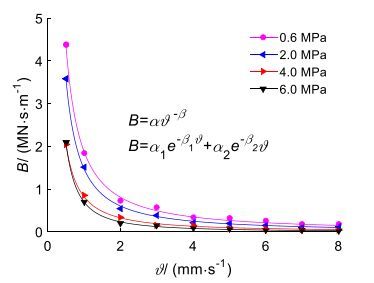
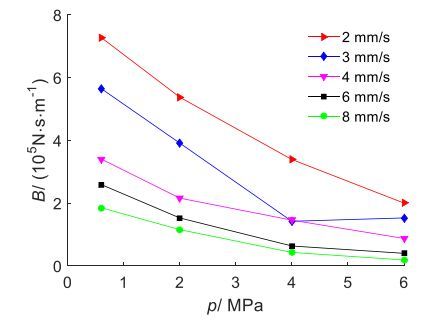
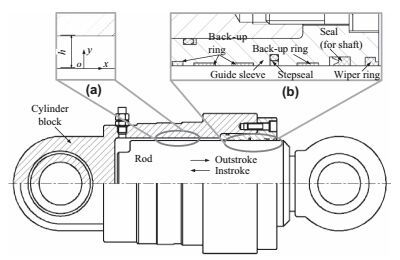
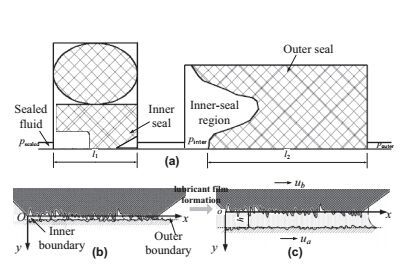
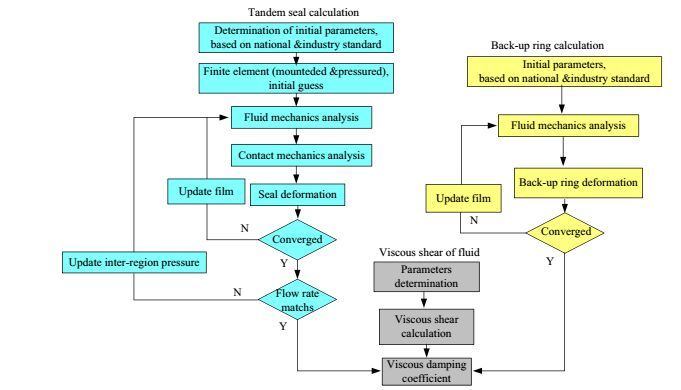
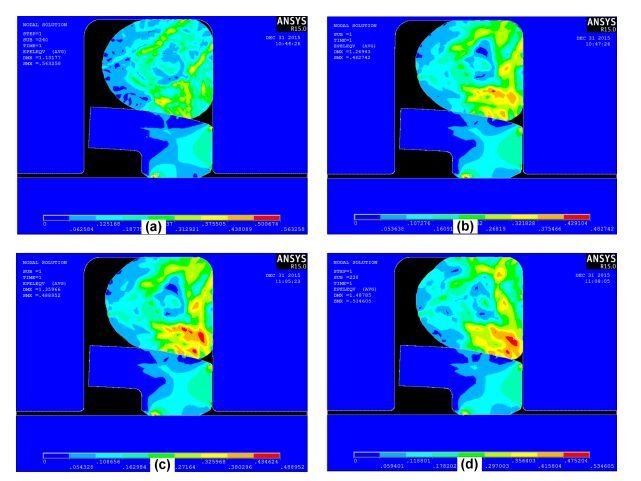
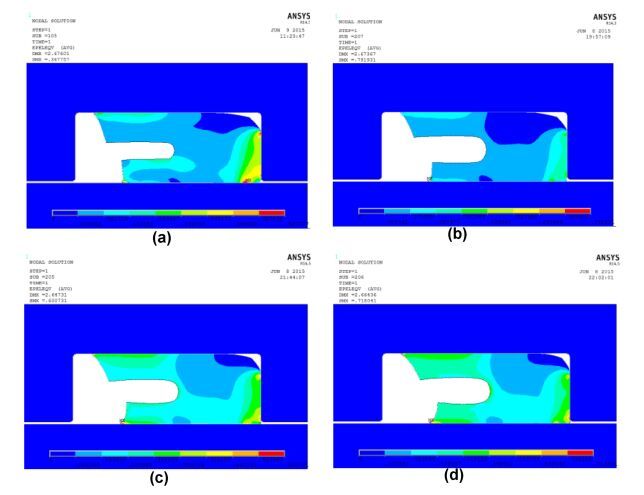
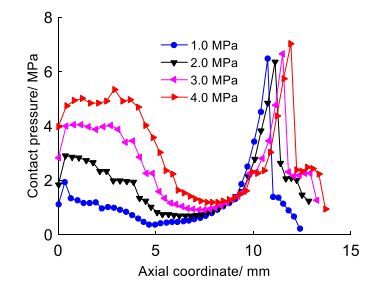
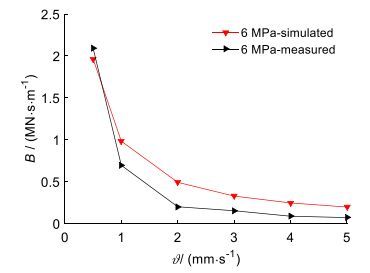
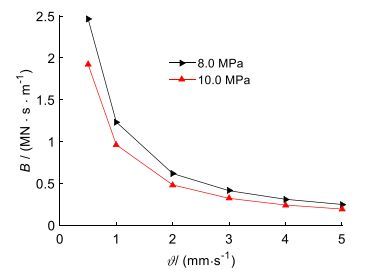
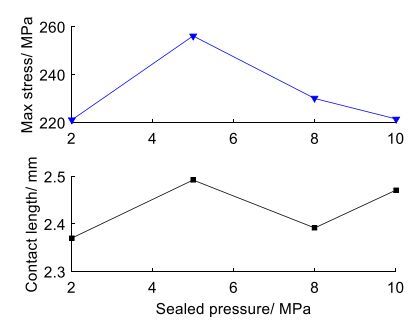
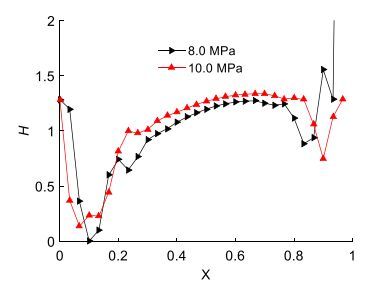
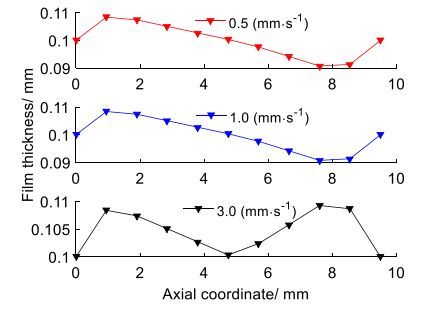
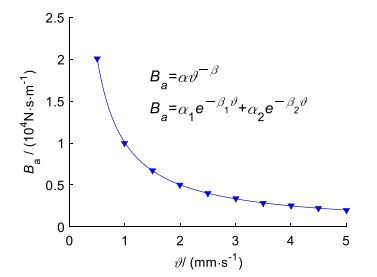
The viscous damping coefficient (VDC) of hydraulic actuators is crucial for system modeling, control and dynamic characteristic analysis. Currently, the researches on hydraulic actuators focus on behavior assessment, promotion of control performance and efficiency. However, the estimation of the VDC is difficult due to a lack of study. Firstly, using two types of hydraulic cylinders, behaviors of the VDC are experimentally examined with velocities and pressure variations. For the tested plunger type hydraulic cylinder, the exponential model B = αv-β, (α > 0, β > 0) or B = α1e-β1v + α2e-β2v(α1, α2 > 0, β1, β2 > 0), fits the relation between the VDC and velocities for a given pressure of chamber with high precision. The magnitude of the VDC decreases almost linearly under certain velocities when increasing the chamber pressure from 0.6 MPa to 6.0 MPa. Furthermore, the effects of the chamber pressures on the VDC of piston and plunge type hydraulic cylinders are different due to different sealing types. In order to investigate the VDC of a plunger type hydraulic actuator drastically, a steady-state numerical model has been developed to describe the mechanism incorporating tandem seal lubrication, back-up ring related friction behaviors and shear stress of fluid. It is shown that the simulated results of VDC agree with the measured results with a good accuracy. The proposed method provides an instruction to predict the VDC in system modeling and analysis.
The viscous damping coefficient (VDC) of hydraulic actuators is crucial for system modeling, control and dynamic characteristic analysis. Currently, the researches on hydraulic actuators focus on behavior assessment, promotion of control performance and efficiency. However, the estimation of the VDC is difficult due to a lack of study. Firstly, using two types of hydraulic cylinders, behaviors of the VDC are experimentally examined with velocities and pressure variations. For the tested plunger type hydraulic cylinder, the exponential model B = αv-β, (α > 0, β > 0) or B = α1e-β1v + α2e-β2v(α1, α2 > 0, β1, β2 > 0), fits the relation between the VDC and velocities for a given pressure of chamber with high precision. The magnitude of the VDC decreases almost linearly under certain velocities when increasing the chamber pressure from 0.6 MPa to 6.0 MPa. Furthermore, the effects of the chamber pressures on the VDC of piston and plunge type hydraulic cylinders are different due to different sealing types. In order to investigate the VDC of a plunger type hydraulic actuator drastically, a steady-state numerical model has been developed to describe the mechanism incorporating tandem seal lubrication, back-up ring related friction behaviors and shear stress of fluid. It is shown that the simulated results of VDC agree with the measured results with a good accuracy. The proposed method provides an instruction to predict the VDC in system modeling and analysis.
2017, 30(4): 843-853.
doi: 10.1007/s10033-017-0152-y
Abstract:
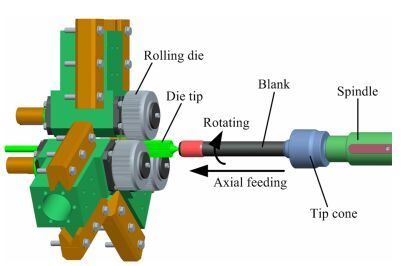
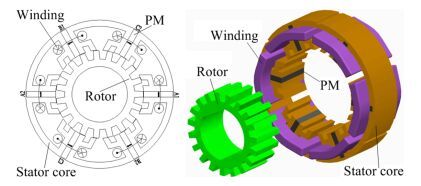
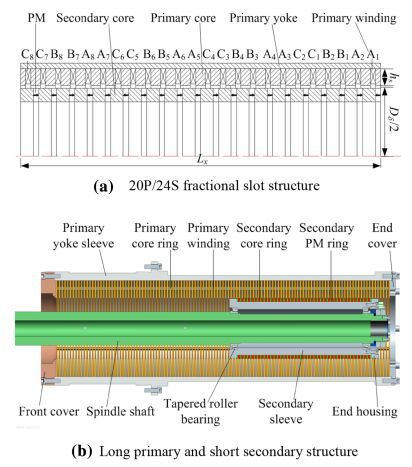
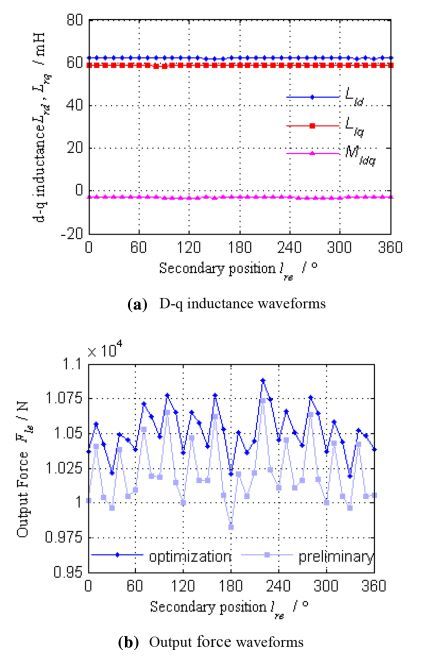
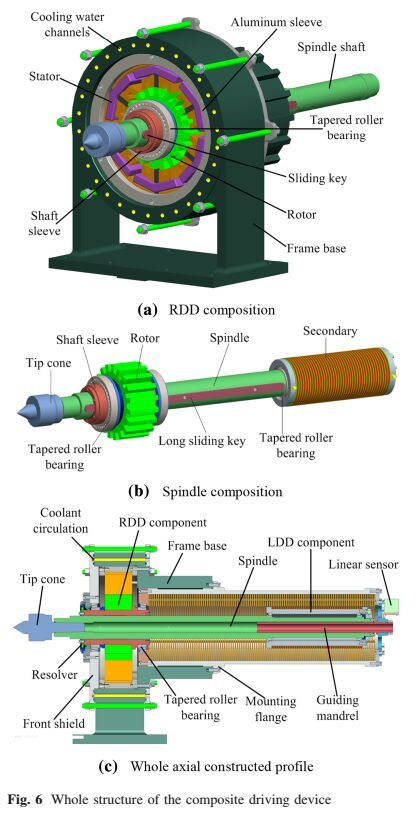
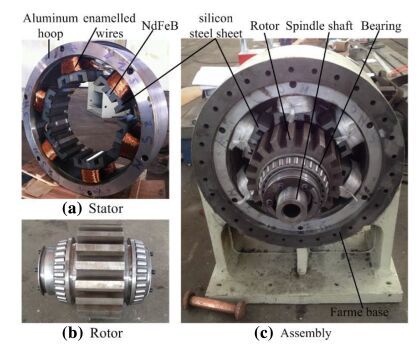
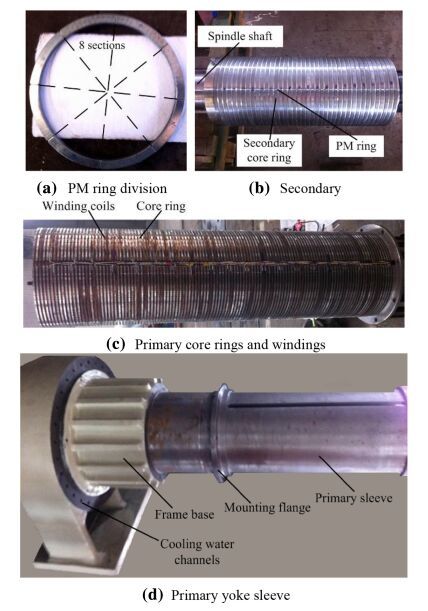
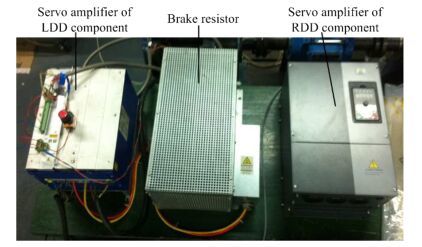
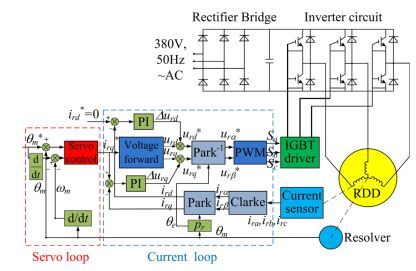
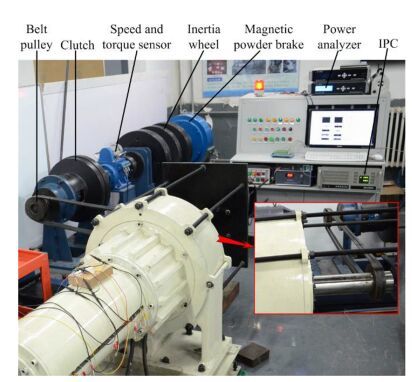
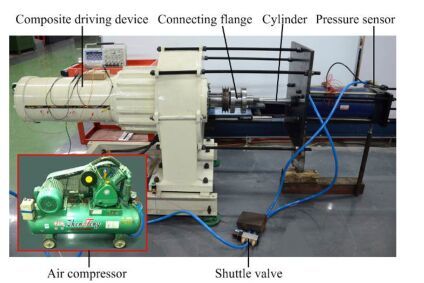
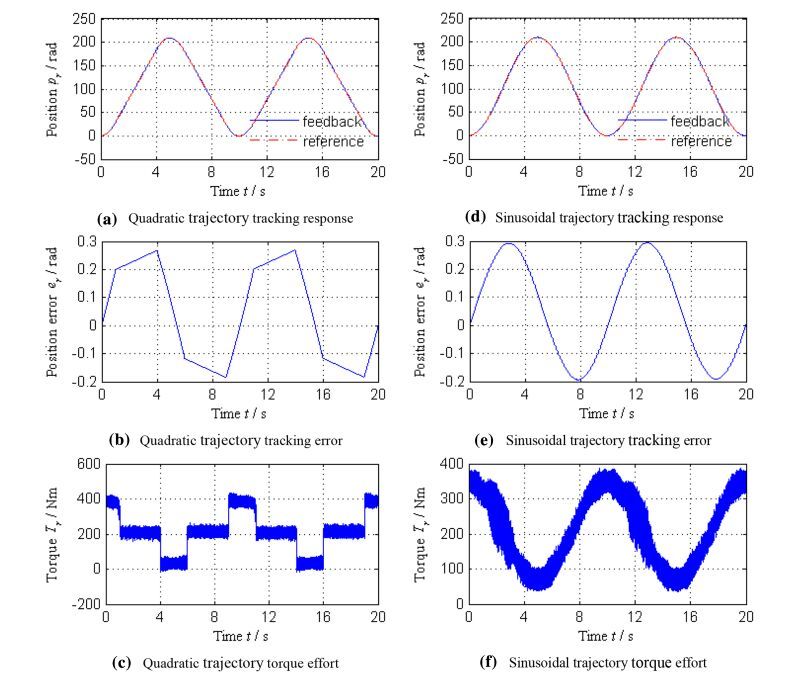
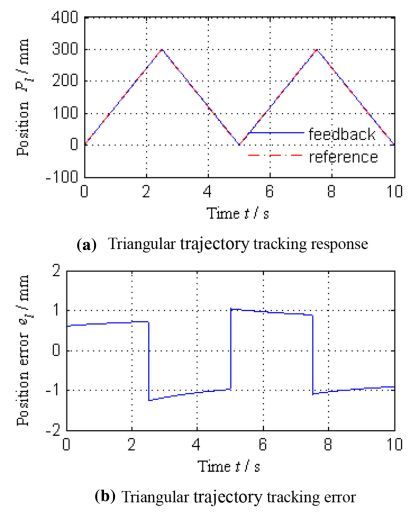
The existing plastic forming equipment are mostly driven by traditional AC motors with long transmission chains, low efficiency, large size, low precision and poor dynamic response are the common disadvantages. In order to realize high performance forming processes, the driving device should be improved, especially for complicated processing motions. Based on electric servo direct drive technology, a novel AC servo rotating and linear composite driving device is proposed, which features implementing both spindle rotation and feed motion without transmission, so that compact structure and precise control can be achieved. Flux switching topology is employed in the rotating drive component for strong robustness, and fractional slot is employed in the linear direct drive component for large force capability. Then the mechanical structure for compositing rotation and linear motion is designed. A device prototype is manufactured, machining of each component and the whole assembly are presented respectively. Commercial servo amplifiers are utilized to construct the control system of the proposed device. To validate the effectiveness of the proposed composite driving device, experimental study on the dynamic test benches are conducted. The results indicate that the output torque can attain to 420 N-m and the dynamic tracking errors are less than about 0.3 rad in the rotating drive. the dynamic tracking errors are less than about 1.6 mm in the linear feed. The proposed research provides a method to construct high efficiency and accuracy direct driving device in plastic forming equipment.
The existing plastic forming equipment are mostly driven by traditional AC motors with long transmission chains, low efficiency, large size, low precision and poor dynamic response are the common disadvantages. In order to realize high performance forming processes, the driving device should be improved, especially for complicated processing motions. Based on electric servo direct drive technology, a novel AC servo rotating and linear composite driving device is proposed, which features implementing both spindle rotation and feed motion without transmission, so that compact structure and precise control can be achieved. Flux switching topology is employed in the rotating drive component for strong robustness, and fractional slot is employed in the linear direct drive component for large force capability. Then the mechanical structure for compositing rotation and linear motion is designed. A device prototype is manufactured, machining of each component and the whole assembly are presented respectively. Commercial servo amplifiers are utilized to construct the control system of the proposed device. To validate the effectiveness of the proposed composite driving device, experimental study on the dynamic test benches are conducted. The results indicate that the output torque can attain to 420 N-m and the dynamic tracking errors are less than about 0.3 rad in the rotating drive. the dynamic tracking errors are less than about 1.6 mm in the linear feed. The proposed research provides a method to construct high efficiency and accuracy direct driving device in plastic forming equipment.


2017, 30(4): 854-865.
doi: 10.1007/s10033-017-0097-1
Abstract:
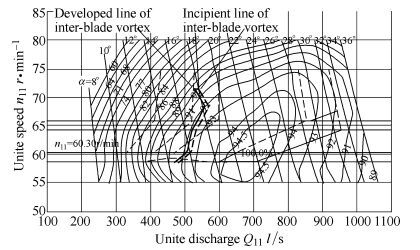
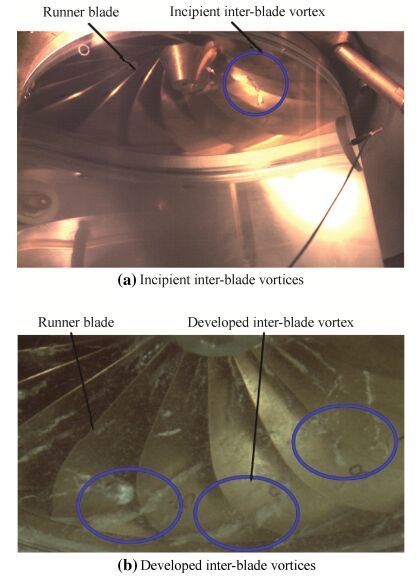
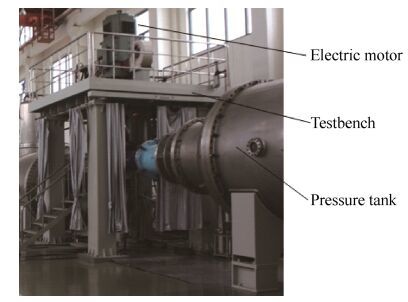
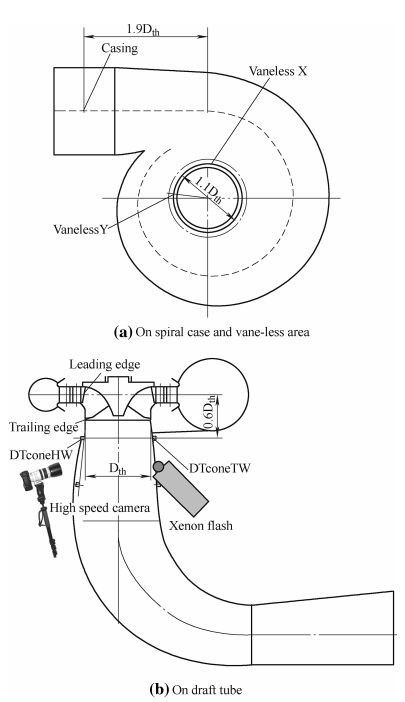
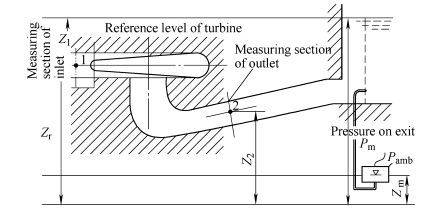
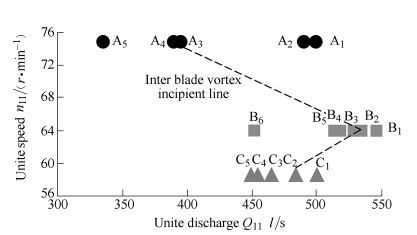
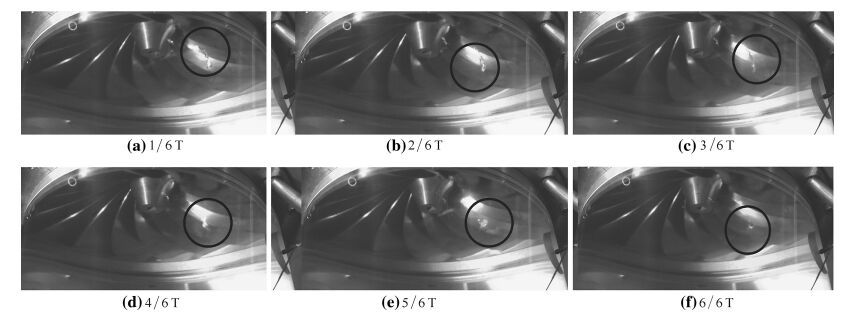
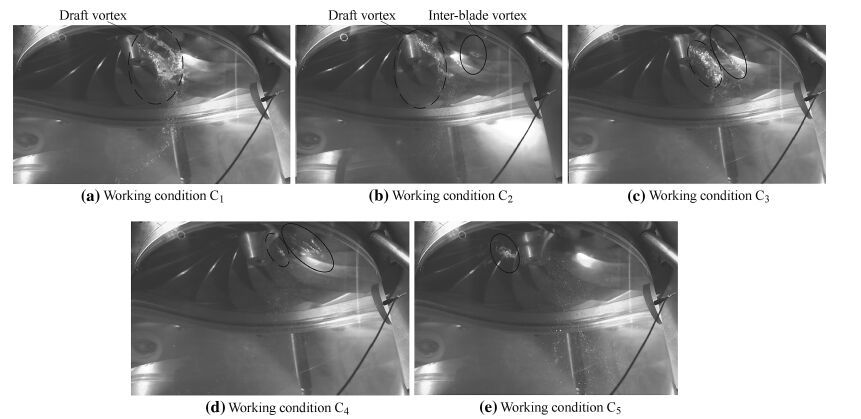
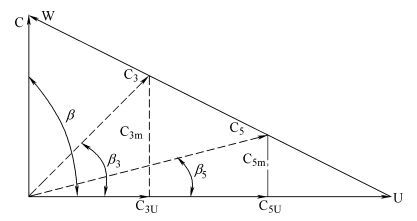
The inter-blade vortex in a Francis turbine becomes one of the main hydraulic factors that are likely to cause blade erosion at deep part load operating conditions. However, the causes and the mechanism of interblade vortex are still under investigation according to present researches. Thus the causes of inter-blade vortex and the effect of different hydraulic parameters on the inter-blade vortex are investigated experimentally. The whole life cycle of the inter-blade vortex is observed by a high speed camera. The test results illustrate the whole life cycle of the inter-blade vortex from generation to separation and even to fading. It is observed that the interblade vortex becomes stronger with the decreasing of flow and head, which leads to pressure fluctuation. Meanwhile, the pressure fluctuations in the vane-less area and the draft tube section become stronger when inter-blade vortices exist in the blade channel. The turbine will be damaged if operating in the inter-blade vortex zone, so its operating range must be far away from that zone. This paper reveals the main cause of the inter-blade vortex which is the larger incidence angle between the inflow angle and the blade angle on the leading edge of the runner at deep part load operating conditions.
The inter-blade vortex in a Francis turbine becomes one of the main hydraulic factors that are likely to cause blade erosion at deep part load operating conditions. However, the causes and the mechanism of interblade vortex are still under investigation according to present researches. Thus the causes of inter-blade vortex and the effect of different hydraulic parameters on the inter-blade vortex are investigated experimentally. The whole life cycle of the inter-blade vortex is observed by a high speed camera. The test results illustrate the whole life cycle of the inter-blade vortex from generation to separation and even to fading. It is observed that the interblade vortex becomes stronger with the decreasing of flow and head, which leads to pressure fluctuation. Meanwhile, the pressure fluctuations in the vane-less area and the draft tube section become stronger when inter-blade vortices exist in the blade channel. The turbine will be damaged if operating in the inter-blade vortex zone, so its operating range must be far away from that zone. This paper reveals the main cause of the inter-blade vortex which is the larger incidence angle between the inflow angle and the blade angle on the leading edge of the runner at deep part load operating conditions.
2017, 30(4): 866-875.
doi: 10.1007/s10033-017-0105-5
Abstract:
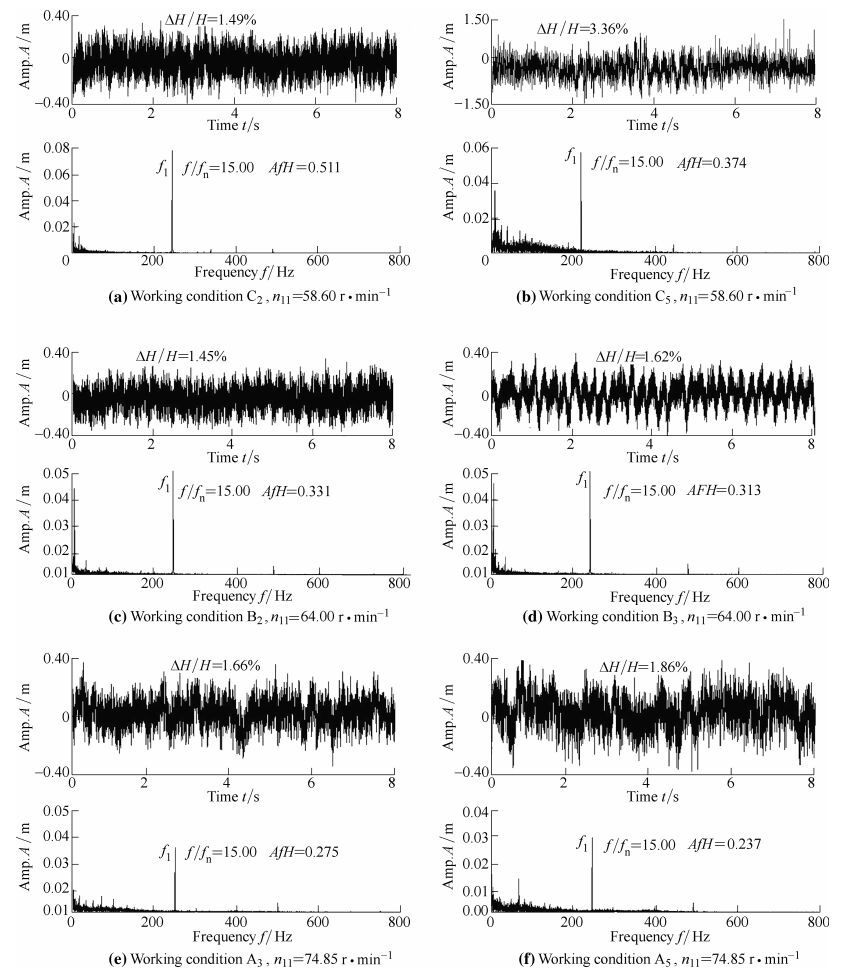
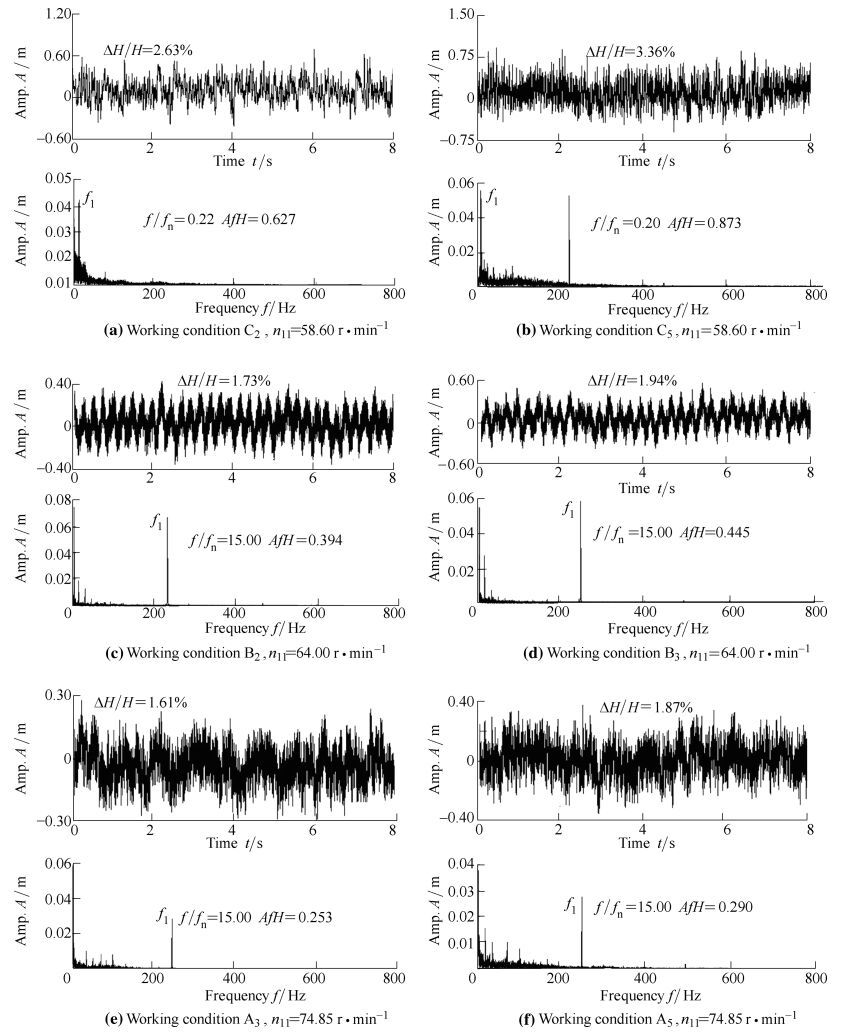
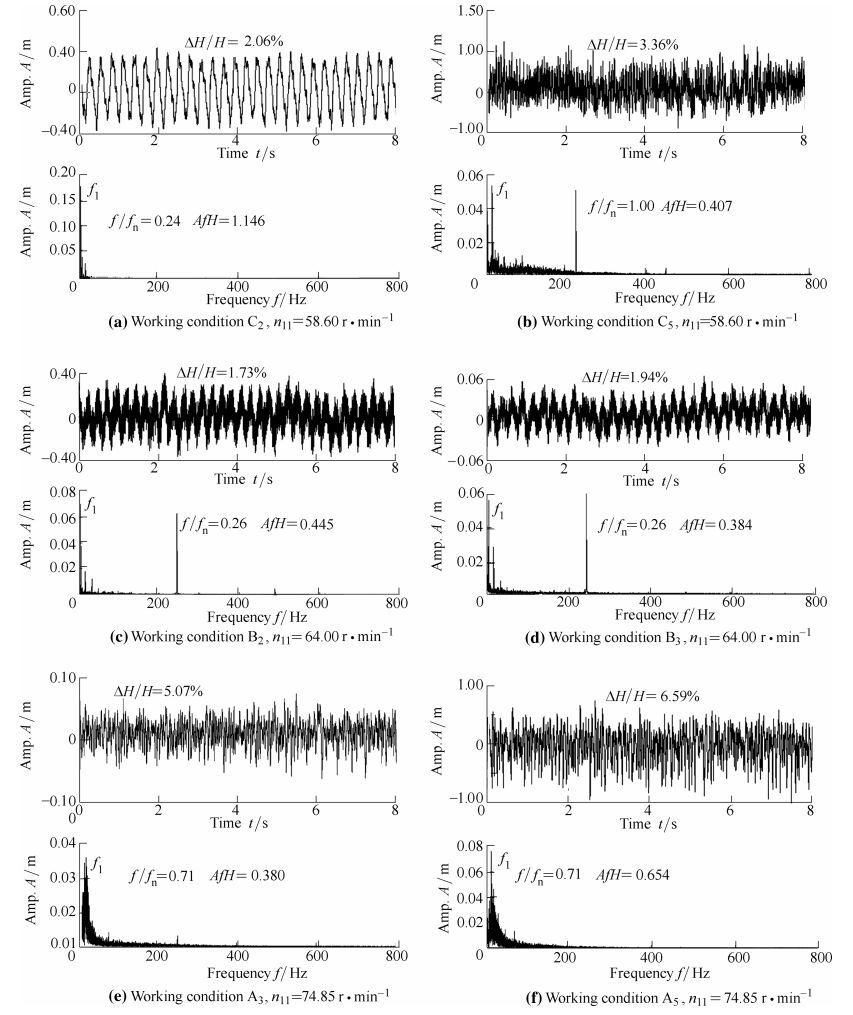
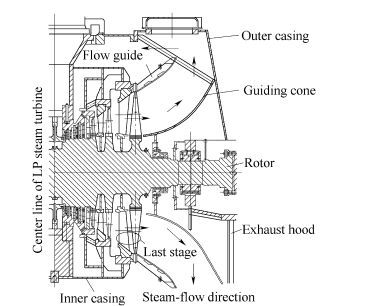
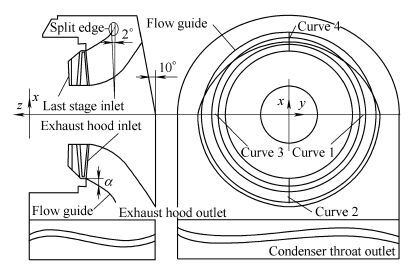
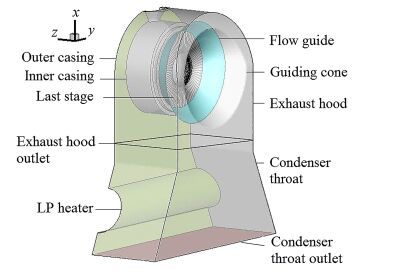
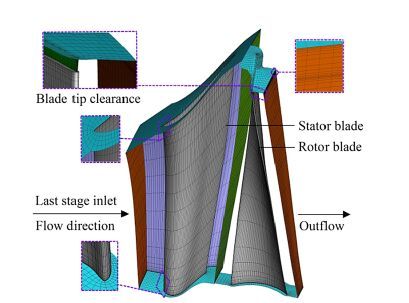
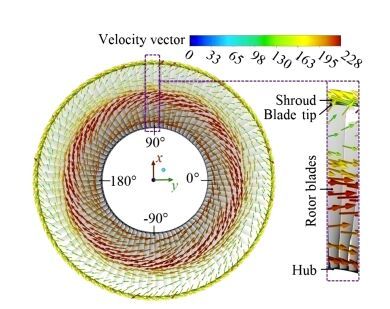
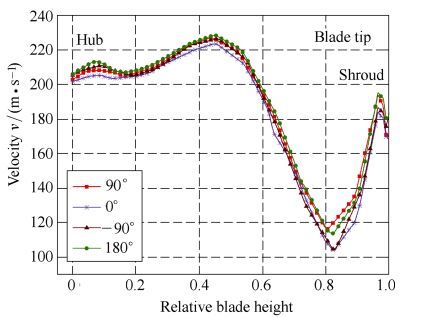
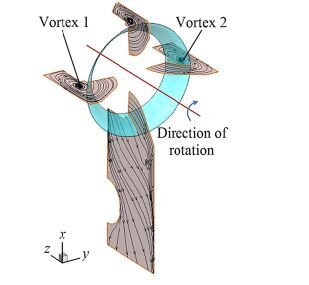
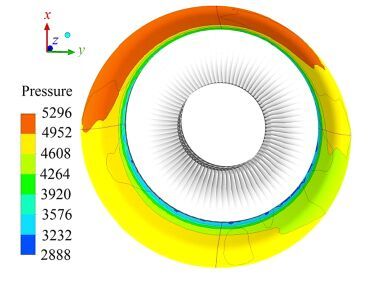
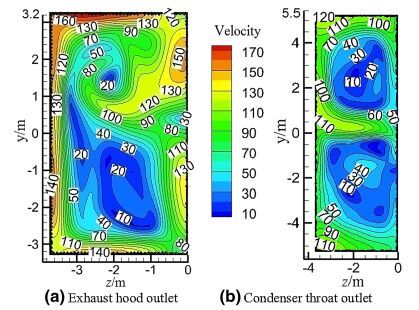
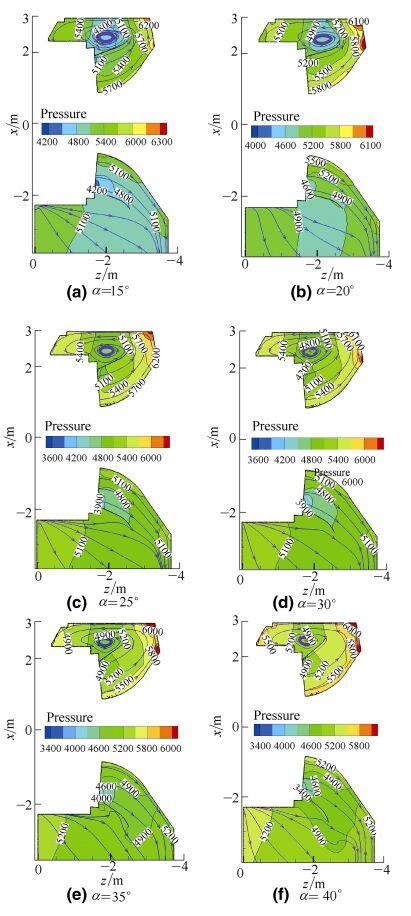
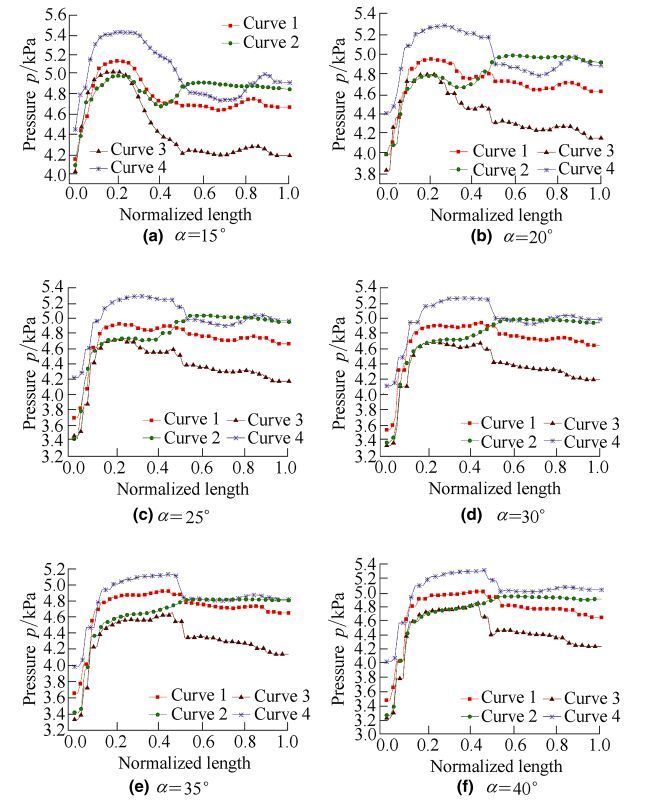
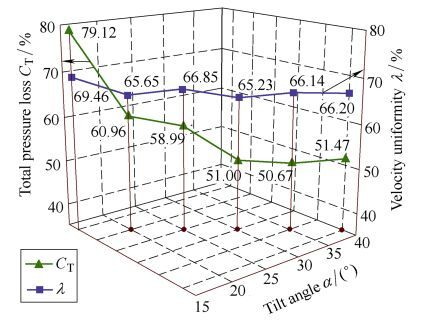
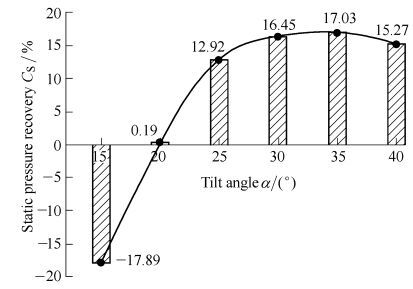
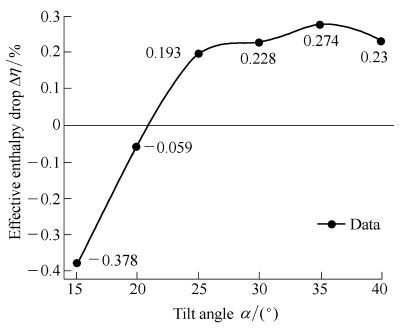
Heat transfer and vacuum in condenser are influenced by the aerodynamic performance of steam turbine exhaust hood. The current research on exhaust hood is mainly focused on analyzing flow loss and optimal design of its structure without consideration of the wet steam condensing flow and the exhaust hood coupled with the front and rear parts. To better understand the aerodynamic performance influenced by the tilt angle of flow guide inside a diffuser, taking a 600 MW steam turbine as an example, a numerical simulator CFX is adopted to solve compressible three-dimensional (3D) Reynolds time-averaged N-S equations and standard k-ε turbulence model. And the exhaust hood flow field influenced by different tilt angles of flow guide is investigated with consideration of the wet steam condensing flow and the exhaust hood coupled with the last stage blades and the condenser throat. The result shows that the total pressure loss coefficient and the static pressure recovery coefficient of exhaust hood change regularly and monotonously with the gradual increase of tilt angle of flow guide. When the tilt angle of flow guide is within the range of 30° to 40°, the static pressure recovery coefficient is in the range of 15.27% to 17.03% and the total pressure loss coefficient drops to approximately 51%, the aerodynamic performance of exhaust hood is significantly improved. And the effective enthalpy drop in steam turbine increases by 0.228% to 0.274%. It is feasible to obtain a reasonable title angle of flow guide by the method of coupling the last stage and the condenser throat to exhaust hood in combination of the wet steam model, which provides a practical guidance to flow guide transformation and optimal design in exhaust hood.
Heat transfer and vacuum in condenser are influenced by the aerodynamic performance of steam turbine exhaust hood. The current research on exhaust hood is mainly focused on analyzing flow loss and optimal design of its structure without consideration of the wet steam condensing flow and the exhaust hood coupled with the front and rear parts. To better understand the aerodynamic performance influenced by the tilt angle of flow guide inside a diffuser, taking a 600 MW steam turbine as an example, a numerical simulator CFX is adopted to solve compressible three-dimensional (3D) Reynolds time-averaged N-S equations and standard k-ε turbulence model. And the exhaust hood flow field influenced by different tilt angles of flow guide is investigated with consideration of the wet steam condensing flow and the exhaust hood coupled with the last stage blades and the condenser throat. The result shows that the total pressure loss coefficient and the static pressure recovery coefficient of exhaust hood change regularly and monotonously with the gradual increase of tilt angle of flow guide. When the tilt angle of flow guide is within the range of 30° to 40°, the static pressure recovery coefficient is in the range of 15.27% to 17.03% and the total pressure loss coefficient drops to approximately 51%, the aerodynamic performance of exhaust hood is significantly improved. And the effective enthalpy drop in steam turbine increases by 0.228% to 0.274%. It is feasible to obtain a reasonable title angle of flow guide by the method of coupling the last stage and the condenser throat to exhaust hood in combination of the wet steam model, which provides a practical guidance to flow guide transformation and optimal design in exhaust hood.

2017, 30(4): 876-887.
doi: 10.1007/s10033-017-0111-7
Abstract:
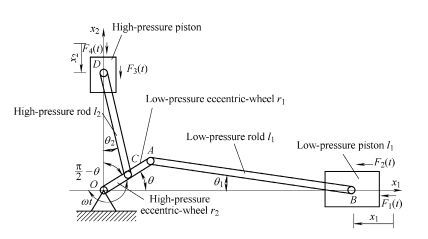
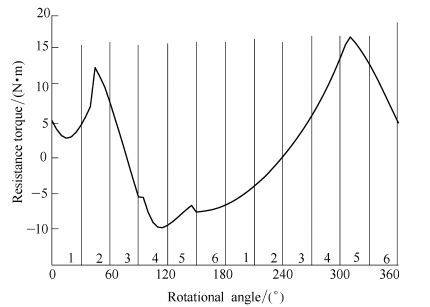
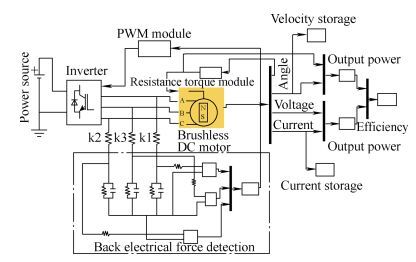
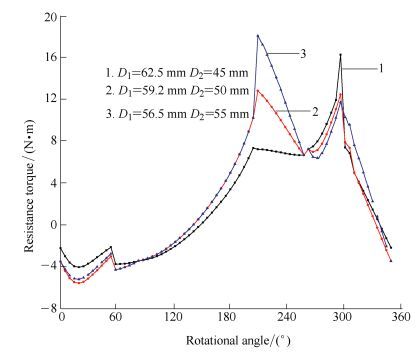
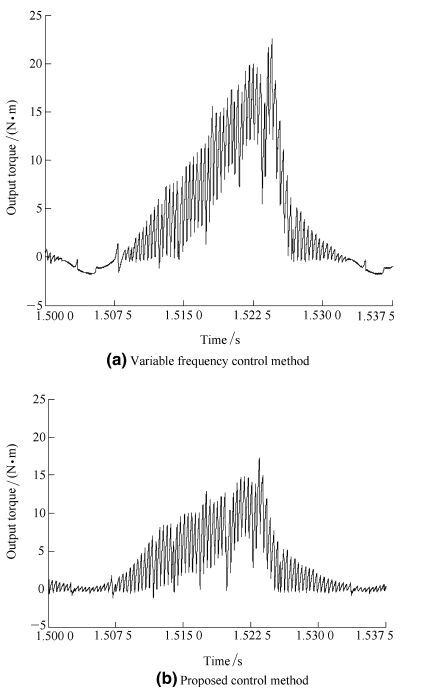
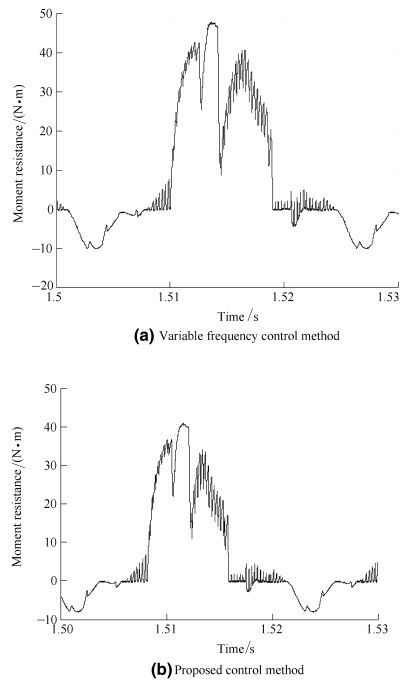
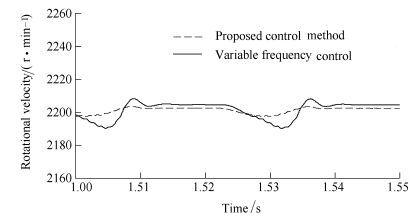
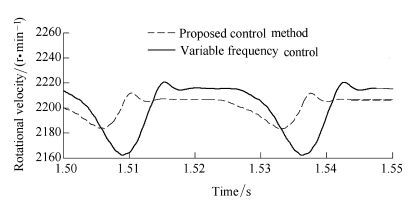
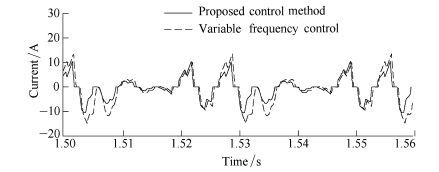
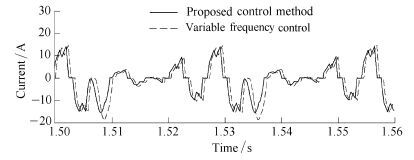
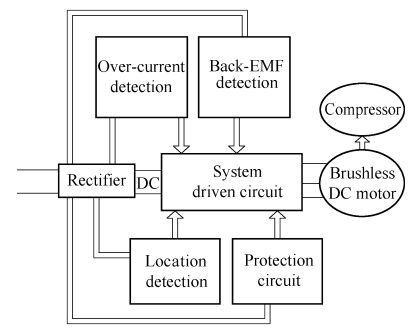
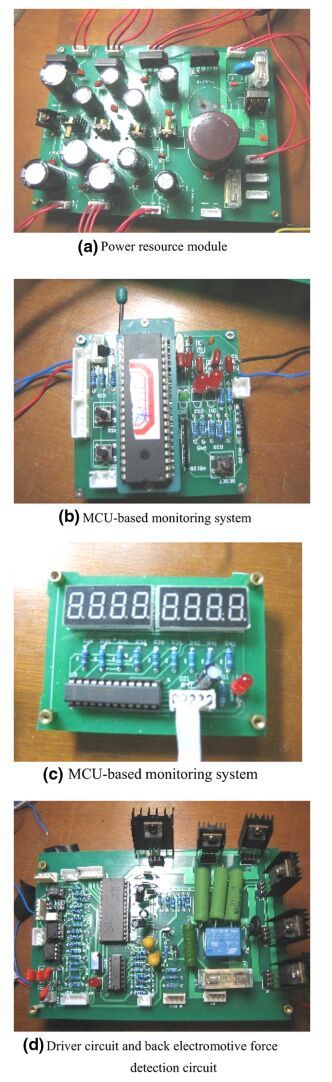
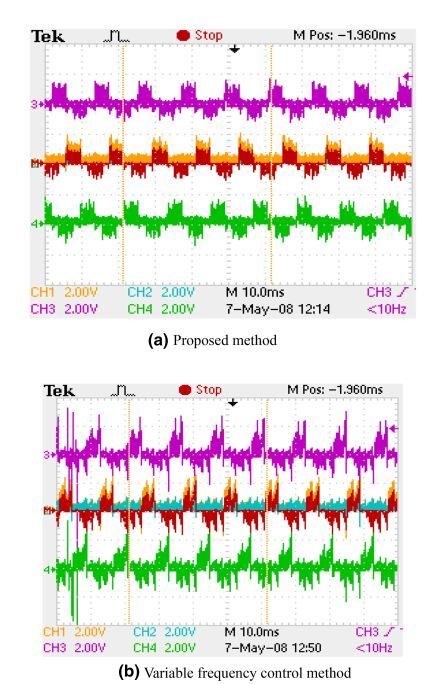
The resistance torque of a piston stage Ⅱ compressor generates strenuous fluctuations in a rotational period, and this can lead to negative influences on the working performance of the compressor. To restrain the strenuous fluctuations in the piston stage Ⅱ compressor, a variable duty-cycle control method based on the resistance torque is proposed. A dynamic model of a stage Ⅱ compressor is set up, and the resistance torque and other characteristic parameters are acquired as the control targets. Then, a variable duty-cycle control method is applied to track the resistance torque, thereby improving the working performance of the compressor. Simulated results show that the compressor, driven by the proposed method, requires lower current, while the rotating speed and the output torque remain comparable to the traditional variable-frequency control methods. A variable duty-cycle control system is developed, and the experimental results prove that the proposed method can help reduce the specific power, input power, and working noise of the compressor to 0.97 kW·m-3·min-1, 0.09 kW and 3.10 dB, respectively, under the same conditions of discharge pressure of 2.00 MPa and a discharge volume of 0.095 m3/ min. The proposed variable duty-cycle control method tracks the resistance torque dynamically, and improves the working performance of a Stage Ⅱ Compressor. The proposed variable duty-cycle control method can be applied to other compressors, and can provide theoretical guidance for the compressor.
The resistance torque of a piston stage Ⅱ compressor generates strenuous fluctuations in a rotational period, and this can lead to negative influences on the working performance of the compressor. To restrain the strenuous fluctuations in the piston stage Ⅱ compressor, a variable duty-cycle control method based on the resistance torque is proposed. A dynamic model of a stage Ⅱ compressor is set up, and the resistance torque and other characteristic parameters are acquired as the control targets. Then, a variable duty-cycle control method is applied to track the resistance torque, thereby improving the working performance of the compressor. Simulated results show that the compressor, driven by the proposed method, requires lower current, while the rotating speed and the output torque remain comparable to the traditional variable-frequency control methods. A variable duty-cycle control system is developed, and the experimental results prove that the proposed method can help reduce the specific power, input power, and working noise of the compressor to 0.97 kW·m-3·min-1, 0.09 kW and 3.10 dB, respectively, under the same conditions of discharge pressure of 2.00 MPa and a discharge volume of 0.095 m3/ min. The proposed variable duty-cycle control method tracks the resistance torque dynamically, and improves the working performance of a Stage Ⅱ Compressor. The proposed variable duty-cycle control method can be applied to other compressors, and can provide theoretical guidance for the compressor.

2017, 30(4): 888-899.
doi: 10.1007/s10033-017-0102-8
Abstract:
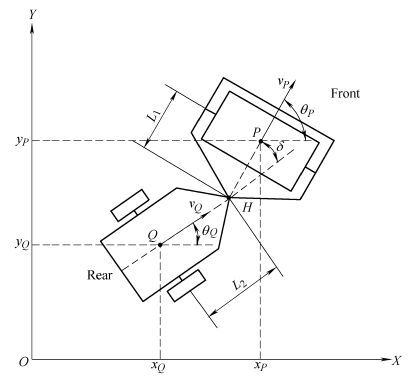
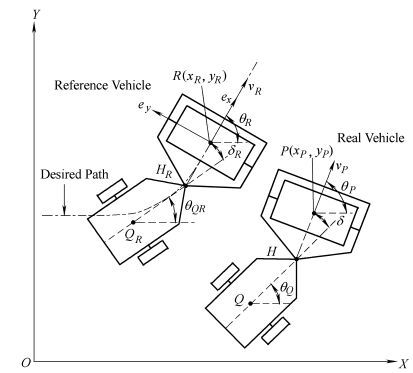
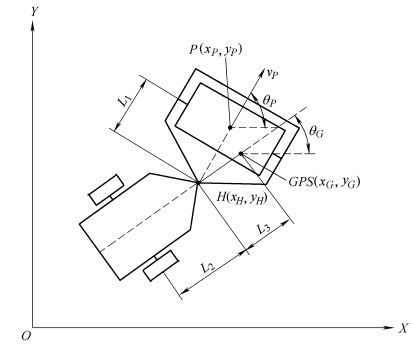
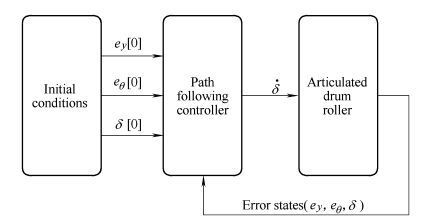
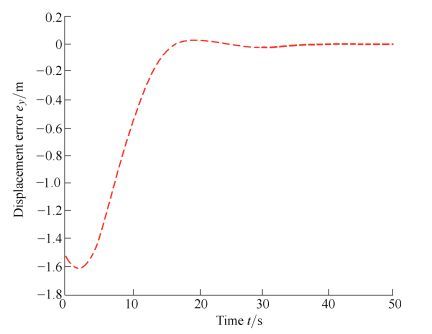
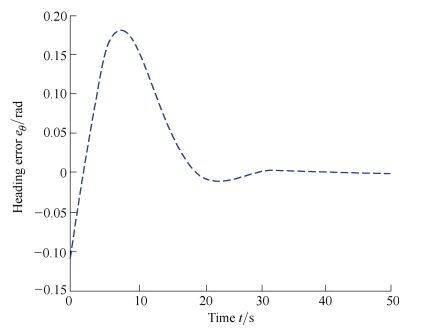
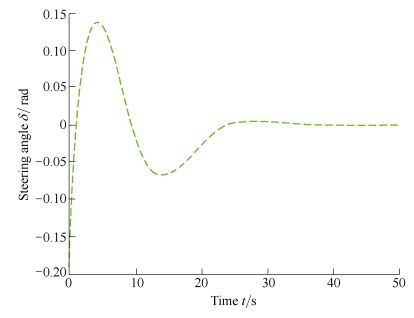
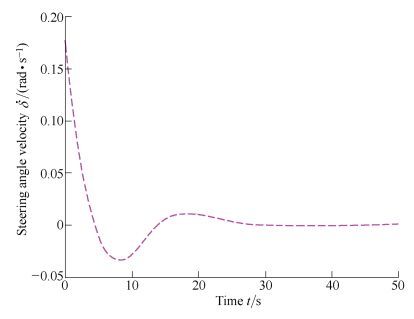
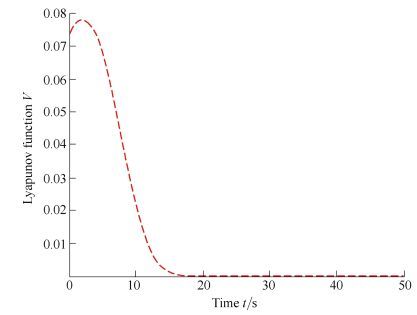
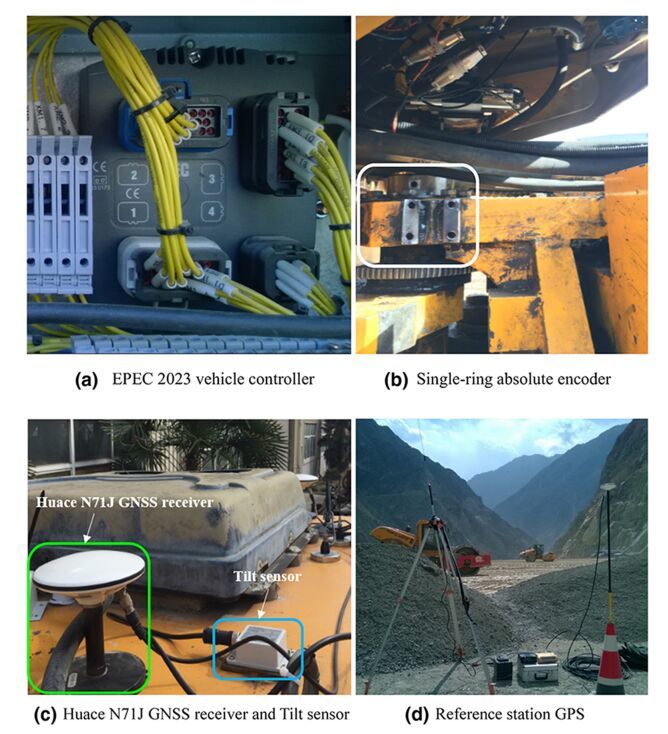
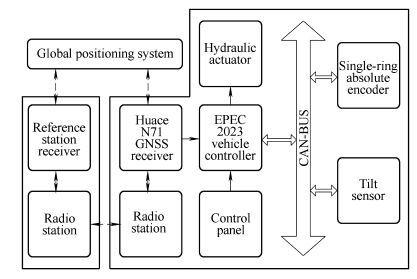
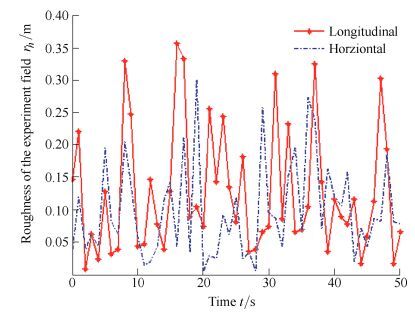
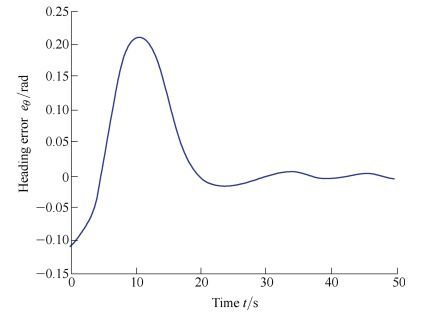
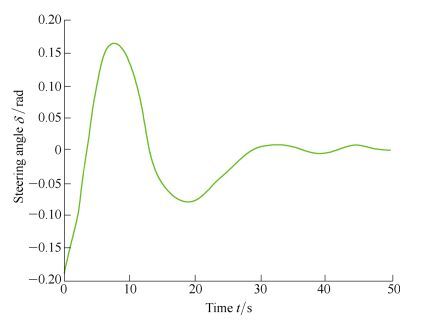
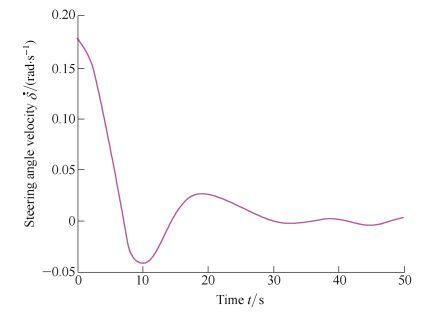
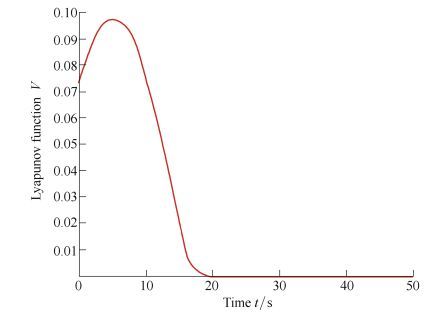
Automatic navigation of an articulated drum roller, which is an articulated steering type vehicle widely used in the construction industry, is highly expected for operation cost reduction and improvement of work efficiency. In order to achieve the path following control, considering that its steering system is articulated steering and two frames are articulated by an active revolute joint, a kinematic model and an error dynamic state-space equation of an articulated drum roller are proposed. Besides, a statefeedback control law based on Lyapunov stability theory is also designed, which can be proved to achieve the purpose of control by the analysis of stability. What's more, to evaluate the performance of the proposed method, simulation under the MATLAB/Simulink and experiments using positioning algorithm and errors correction at the uneven construction site are performed, with initial displacement error (-1.5 m), heading error (-0.11 rad) and steering angle (-0.19 rad). Finally, simulation and experimental results show that the errors and steering angle can decrease gradually, and converge to zero with time. Meanwhile, the control input is not saturated. An articulated drum roller can lock into a desired path with the proposed method in uneven fields.
Automatic navigation of an articulated drum roller, which is an articulated steering type vehicle widely used in the construction industry, is highly expected for operation cost reduction and improvement of work efficiency. In order to achieve the path following control, considering that its steering system is articulated steering and two frames are articulated by an active revolute joint, a kinematic model and an error dynamic state-space equation of an articulated drum roller are proposed. Besides, a statefeedback control law based on Lyapunov stability theory is also designed, which can be proved to achieve the purpose of control by the analysis of stability. What's more, to evaluate the performance of the proposed method, simulation under the MATLAB/Simulink and experiments using positioning algorithm and errors correction at the uneven construction site are performed, with initial displacement error (-1.5 m), heading error (-0.11 rad) and steering angle (-0.19 rad). Finally, simulation and experimental results show that the errors and steering angle can decrease gradually, and converge to zero with time. Meanwhile, the control input is not saturated. An articulated drum roller can lock into a desired path with the proposed method in uneven fields.



2017, 30(4): 900-912.
doi: 10.1007/s10033-017-0139-8
Abstract:
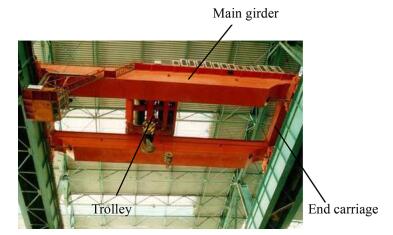
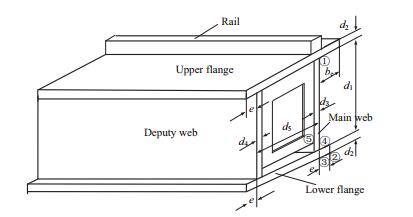
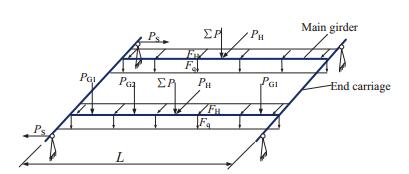
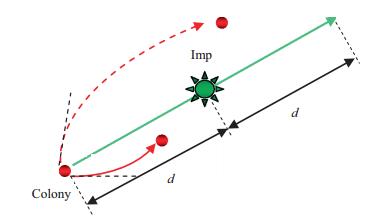
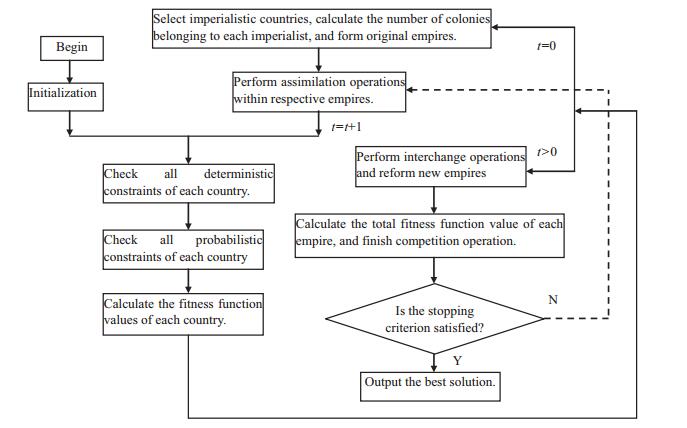
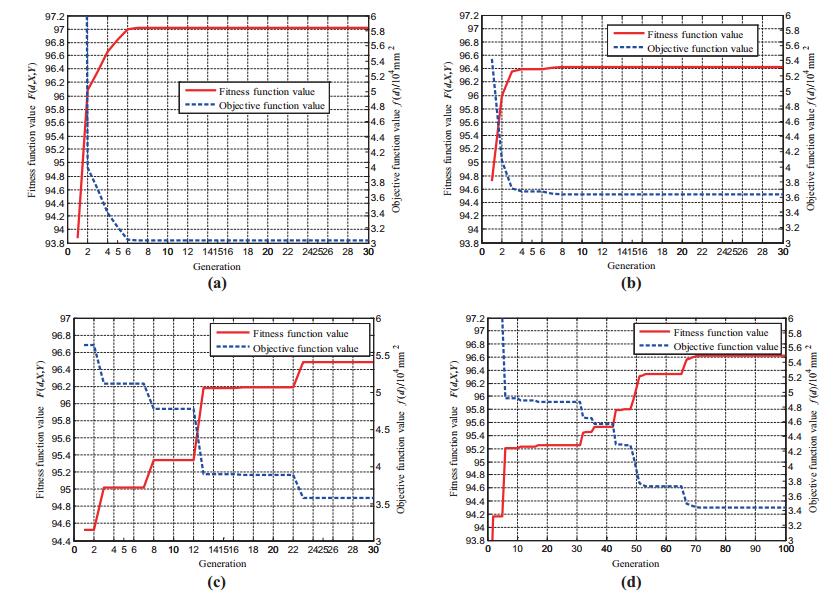
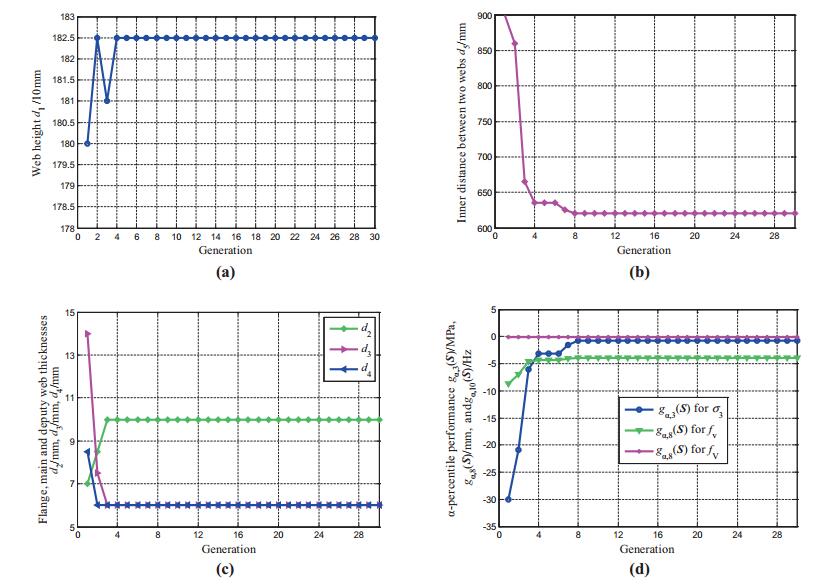
Uncertainties in parameters such as materials, loading, and geometry are inevitable in designing metallic structures for cranes. When considering these uncertainty factors, reliability-based design optimization (RBDO) offers a more reasonable design approach. However, existing RBDO methods for crane metallic structures are prone to low convergence speed and high computational cost. A unilevel RBDO method, combining a discrete imperialist competitive algorithm with an inverse reliability strategy based on the performance measure approach, is developed. Application of the imperialist competitive algorithm at the optimization level significantly improves the convergence speed of this RBDO method. At the reliability analysis level, the inverse reliability strategy is used to determine the feasibility of each probabilistic constraint at each design point by calculating its α-percentile performance, thereby avoiding convergence failure, calculation error, and disproportionate computational effort encountered using conventional moment and simulation methods. Application of the RBDO method to an actual crane structure shows that the developed RBDO realizes a design with the best tradeoff between economy and safety together with about one-third of the convergence speed and the computational cost of the existing method. This paper provides a scientific and effective design approach for the design of metallic structures of cranes.
Uncertainties in parameters such as materials, loading, and geometry are inevitable in designing metallic structures for cranes. When considering these uncertainty factors, reliability-based design optimization (RBDO) offers a more reasonable design approach. However, existing RBDO methods for crane metallic structures are prone to low convergence speed and high computational cost. A unilevel RBDO method, combining a discrete imperialist competitive algorithm with an inverse reliability strategy based on the performance measure approach, is developed. Application of the imperialist competitive algorithm at the optimization level significantly improves the convergence speed of this RBDO method. At the reliability analysis level, the inverse reliability strategy is used to determine the feasibility of each probabilistic constraint at each design point by calculating its α-percentile performance, thereby avoiding convergence failure, calculation error, and disproportionate computational effort encountered using conventional moment and simulation methods. Application of the RBDO method to an actual crane structure shows that the developed RBDO realizes a design with the best tradeoff between economy and safety together with about one-third of the convergence speed and the computational cost of the existing method. This paper provides a scientific and effective design approach for the design of metallic structures of cranes.
2017, 30(4): 913-919.
doi: 10.1007/s10033-017-0159-4
Abstract:
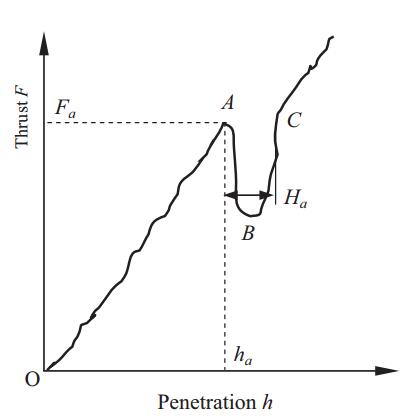
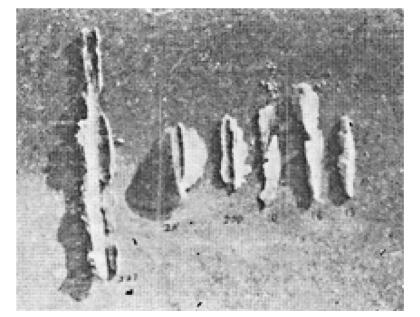
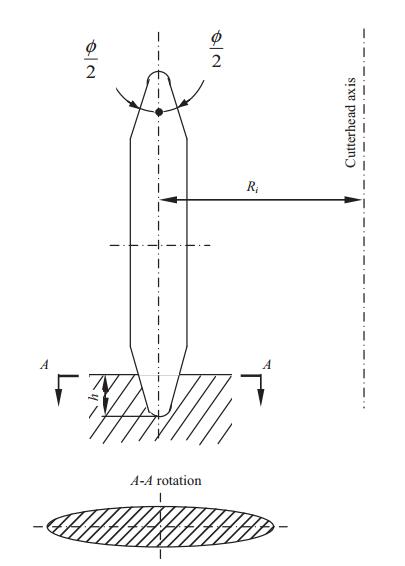
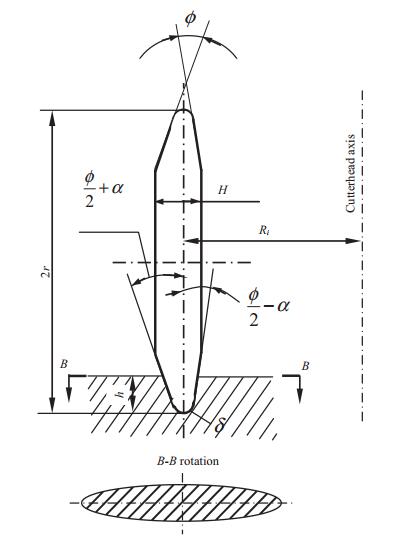
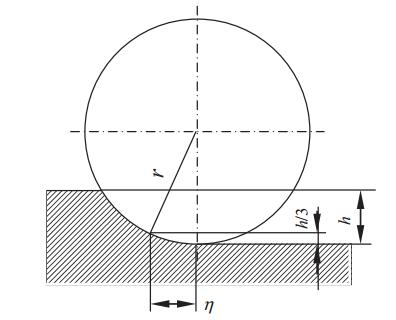
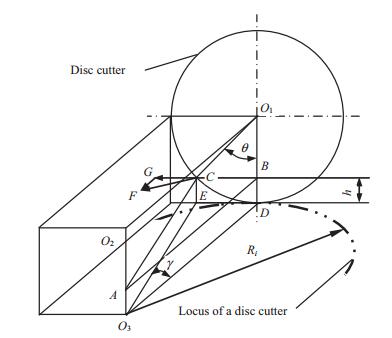
Attempts to minimize energy consumption of a tunnel boring machine disc cutter during the process of fragmentation have largely focused on optimizing disccutter spacing, as determined by the minimum specific energy required for fragmentation; however, indentation tests showed that rock deforms plastically beneath the cutters. Equations for thrust were developed for both the traditional, popularly employed disc cutter and anew design based on three-dimensional theory. The respective energy consumption for penetration, rolling, and side-slip fragmentations were obtained. A change in disc-cutter fragmentation angles resulted in a change in the nature of the interaction between the cutter and rock, which lowered the specific energy of fragmentation. During actual field excavations to the same penetration length, the combined energy consumption for fragmentation using the newly designed cutters was 15% lower than that when using the traditional design. This paper presents a theory for energy saving in tunnel boring machines. Investigation results showed that the disc cutters designed using this theory were more durable than traditional designs, and effectively lowered the energy consumption.
Attempts to minimize energy consumption of a tunnel boring machine disc cutter during the process of fragmentation have largely focused on optimizing disccutter spacing, as determined by the minimum specific energy required for fragmentation; however, indentation tests showed that rock deforms plastically beneath the cutters. Equations for thrust were developed for both the traditional, popularly employed disc cutter and anew design based on three-dimensional theory. The respective energy consumption for penetration, rolling, and side-slip fragmentations were obtained. A change in disc-cutter fragmentation angles resulted in a change in the nature of the interaction between the cutter and rock, which lowered the specific energy of fragmentation. During actual field excavations to the same penetration length, the combined energy consumption for fragmentation using the newly designed cutters was 15% lower than that when using the traditional design. This paper presents a theory for energy saving in tunnel boring machines. Investigation results showed that the disc cutters designed using this theory were more durable than traditional designs, and effectively lowered the energy consumption.
2017, 30(4): 920-932.
doi: 10.1007/s10033-017-0154-9
Abstract:
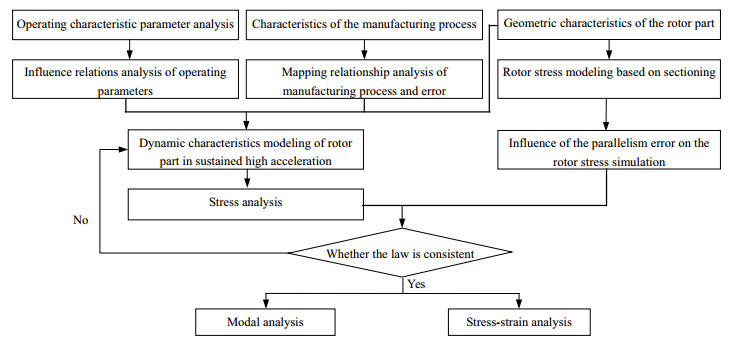
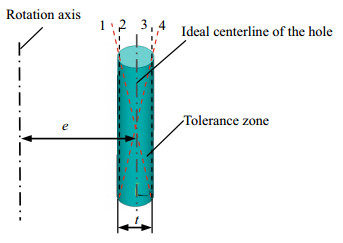
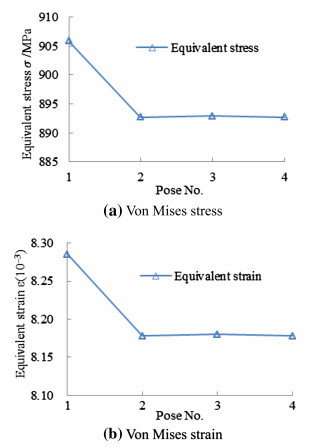
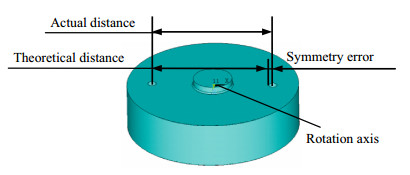
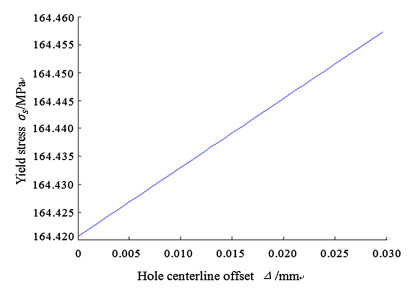
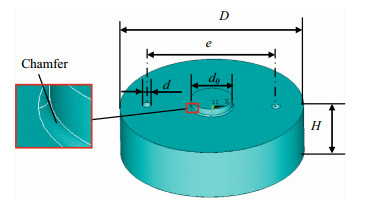
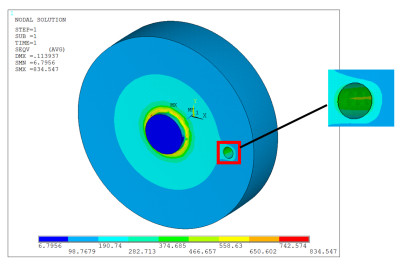
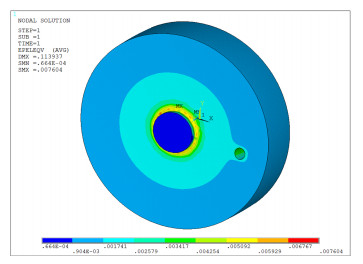
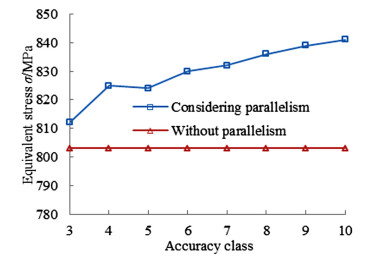
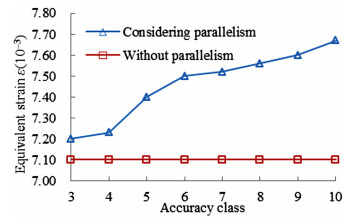
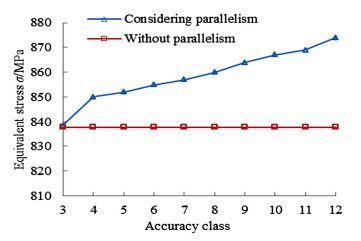
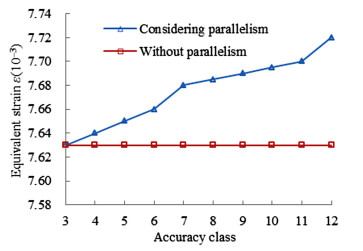
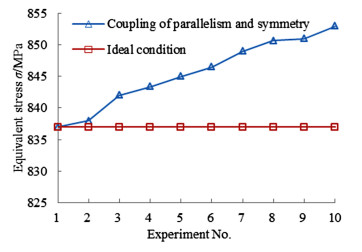
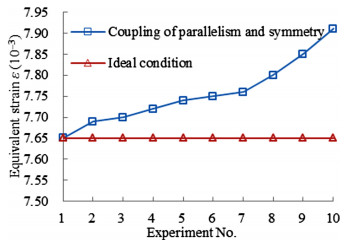
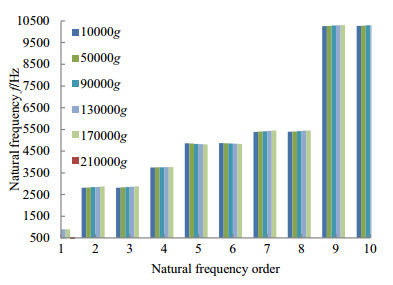
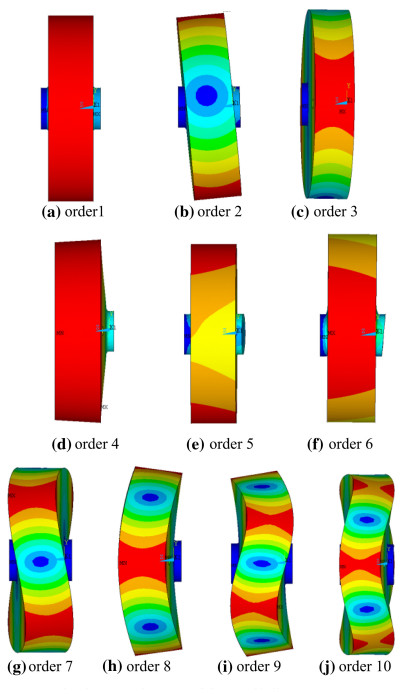
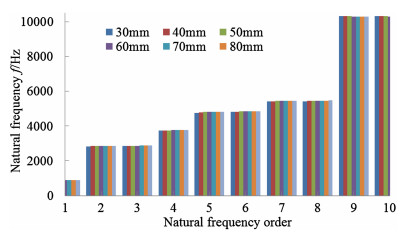
Stress, strain and vibration characteristics of rotor parts should be changed significantly under high acceleration, manufacturing error is one of the most important reason. However, current research on this problem has not been carried out. A rotor with an acceleration of 150, 000 g is considered as the objective, the effects of manufacturing errors on rotor mechanical properties and dynamic characteristics are executed by the selection of the key affecting factors. Through the force balance equation of the rotor infinitesimal unit establishment, a theoretical model of stress calculation based on slice method is proposed and established, a formula for the rotor stress at any point derives. A finite element model (FEM) of rotor with holes is established with manufacturing errors. The changes of the stresses and strains of a rotor in parallelism and symmetry errors are analyzed, which verify the validity of the theoretical model. The pre-stressing modal analysis is performed based on the aforementioned static analysis. The key dynamic characteristics are analyzed. The results demonstrated that, as the parallelism and symmetry errors increase, the equivalent stresses and strains of the rotor slowly increase linearly, the highest growth rate does not exceed 4%, the maximum change rate of natural frequency is 0.1%. The rotor vibration mode is not significantly affected. The FEM construction method of the rotor with manufacturing errors can be utilized for the quantitative research on rotor characteristics, which will assist in the active control of rotor component reliability under high acceleration.
Stress, strain and vibration characteristics of rotor parts should be changed significantly under high acceleration, manufacturing error is one of the most important reason. However, current research on this problem has not been carried out. A rotor with an acceleration of 150, 000 g is considered as the objective, the effects of manufacturing errors on rotor mechanical properties and dynamic characteristics are executed by the selection of the key affecting factors. Through the force balance equation of the rotor infinitesimal unit establishment, a theoretical model of stress calculation based on slice method is proposed and established, a formula for the rotor stress at any point derives. A finite element model (FEM) of rotor with holes is established with manufacturing errors. The changes of the stresses and strains of a rotor in parallelism and symmetry errors are analyzed, which verify the validity of the theoretical model. The pre-stressing modal analysis is performed based on the aforementioned static analysis. The key dynamic characteristics are analyzed. The results demonstrated that, as the parallelism and symmetry errors increase, the equivalent stresses and strains of the rotor slowly increase linearly, the highest growth rate does not exceed 4%, the maximum change rate of natural frequency is 0.1%. The rotor vibration mode is not significantly affected. The FEM construction method of the rotor with manufacturing errors can be utilized for the quantitative research on rotor characteristics, which will assist in the active control of rotor component reliability under high acceleration.

2017, 30(4): 933-942.
doi: 10.1007/s10033-017-0144-y
Abstract:
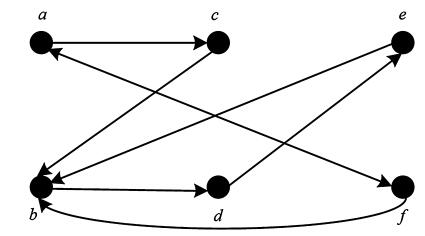
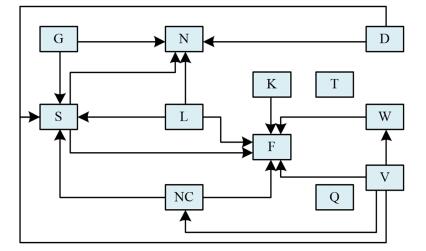
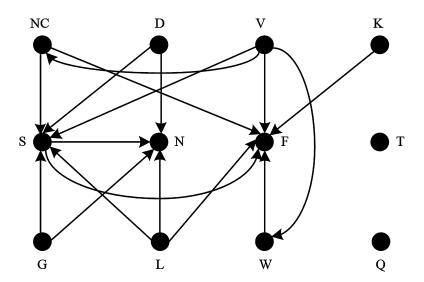
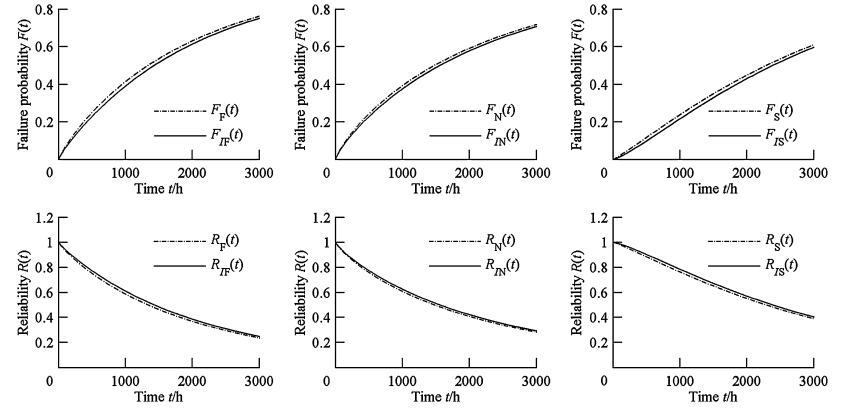
In order to rectify the problems that the component reliability model exhibits deviation, and the evaluation result is low due to the overlook of failure propagation in traditional reliability evaluation of machine center components, a new reliability evaluation method based on cascading failure analysis and the failure influenced degree assessment is proposed. A direct graph model of cascading failure among components is established according to cascading failure mechanism analysis and graph theory. The failure influenced degrees of the system components are assessed by the adjacency matrix and its transposition, combined with the Pagerank algorithm. Based on the comprehensive failure probability function and total probability formula, the inherent failure probability function is determined to realize the reliability evaluation of the system components. Finally, the method is applied to a machine center, it shows the following: 1) The reliability evaluation values of the proposed method are at least 2.5% higher than those of the traditional method; 2) The difference between the comprehensive and inherent reliability of the system component presents a positive correlation with the failure influenced degree of the system component, which provides a theoretical basis for reliability allocation of machine center system.
In order to rectify the problems that the component reliability model exhibits deviation, and the evaluation result is low due to the overlook of failure propagation in traditional reliability evaluation of machine center components, a new reliability evaluation method based on cascading failure analysis and the failure influenced degree assessment is proposed. A direct graph model of cascading failure among components is established according to cascading failure mechanism analysis and graph theory. The failure influenced degrees of the system components are assessed by the adjacency matrix and its transposition, combined with the Pagerank algorithm. Based on the comprehensive failure probability function and total probability formula, the inherent failure probability function is determined to realize the reliability evaluation of the system components. Finally, the method is applied to a machine center, it shows the following: 1) The reliability evaluation values of the proposed method are at least 2.5% higher than those of the traditional method; 2) The difference between the comprehensive and inherent reliability of the system component presents a positive correlation with the failure influenced degree of the system component, which provides a theoretical basis for reliability allocation of machine center system.
2017, 30(4): 943-950.
doi: 10.1007/s10033-017-0110-8
Abstract:
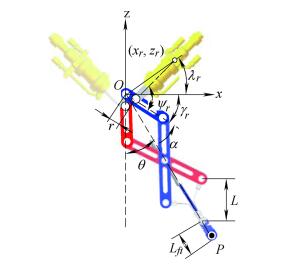
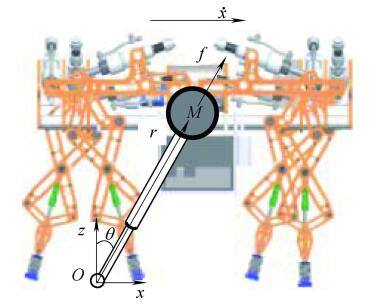
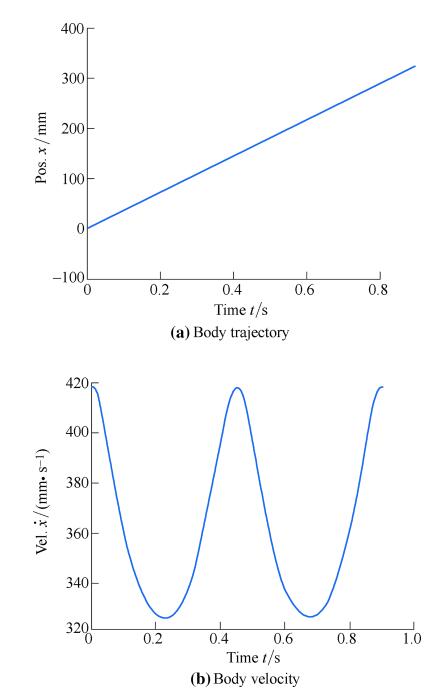
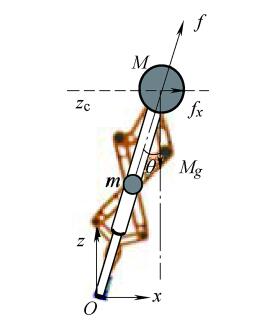
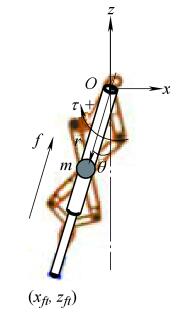
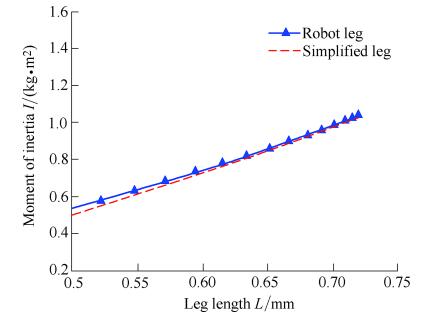
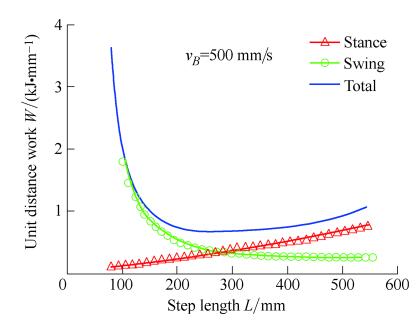
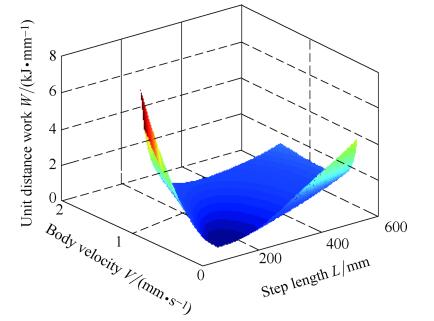
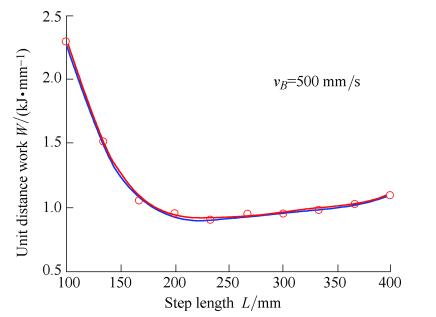
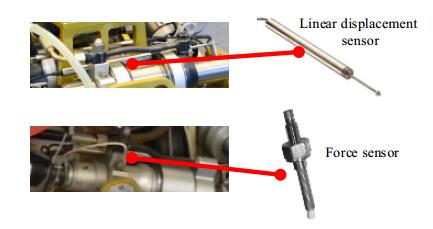
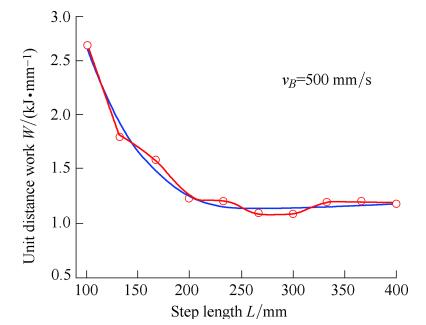
Robots driven by batteries are clean, quiet, and can work indoors or in space. However, the battery endurance is a great problem. A new gait parameter design energy saving strategy to extend the working hours of the quadruped robot is proposed. A dynamic model of the robot is established to estimate and analyze the energy expenditures during trotting. Given a trotting speed, optimal stride frequency and stride length can minimize the energy expenditure. However, the relationship between the speed and the optimal gait parameters is nonlinear, which is difficult for practical application. Therefore, a simplified gait parameter design method for energy saving is proposed. A critical trotting speed of the quadruped robot is found and can be used to decide the gait parameters. When the robot is travelling lower than this speed, it is better to keep a constant stride length and change the cycle period. When the robot is travelling higher than this speed, it is better to keep a constant cycle period and change the stride length. Simulations and experiments on the quadruped robot show that by using the proposed gait parameter design approach, the energy expenditure can be reduced by about 54% compared with the 100 mm stride length under 500 mm/s speed. In general, an energy expenditure model based on the gait parameter of the quadruped robot is built and the trotting gait parameters design approach for energy saving is proposed.
Robots driven by batteries are clean, quiet, and can work indoors or in space. However, the battery endurance is a great problem. A new gait parameter design energy saving strategy to extend the working hours of the quadruped robot is proposed. A dynamic model of the robot is established to estimate and analyze the energy expenditures during trotting. Given a trotting speed, optimal stride frequency and stride length can minimize the energy expenditure. However, the relationship between the speed and the optimal gait parameters is nonlinear, which is difficult for practical application. Therefore, a simplified gait parameter design method for energy saving is proposed. A critical trotting speed of the quadruped robot is found and can be used to decide the gait parameters. When the robot is travelling lower than this speed, it is better to keep a constant stride length and change the cycle period. When the robot is travelling higher than this speed, it is better to keep a constant cycle period and change the stride length. Simulations and experiments on the quadruped robot show that by using the proposed gait parameter design approach, the energy expenditure can be reduced by about 54% compared with the 100 mm stride length under 500 mm/s speed. In general, an energy expenditure model based on the gait parameter of the quadruped robot is built and the trotting gait parameters design approach for energy saving is proposed.





2017, 30(4): 951-962.
doi: 10.1007/s10033-017-0138-9
Abstract:
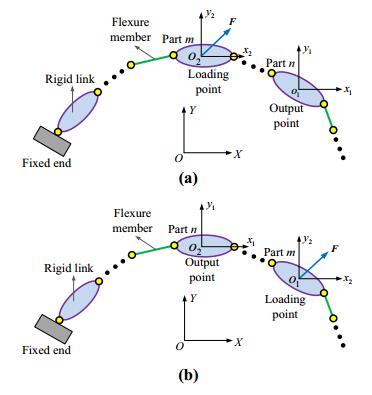
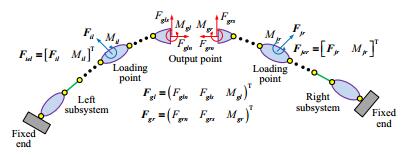
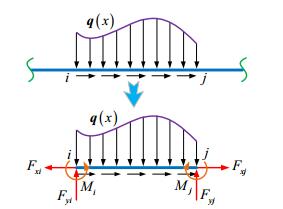
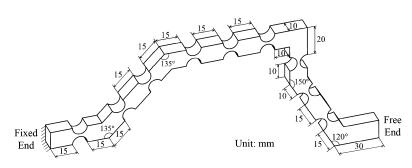
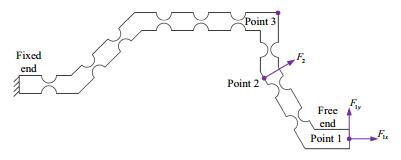
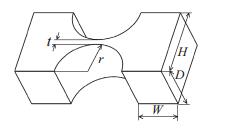
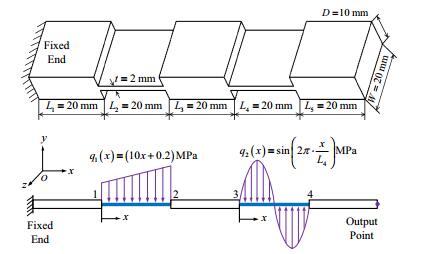
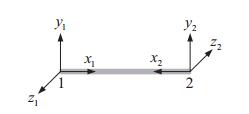
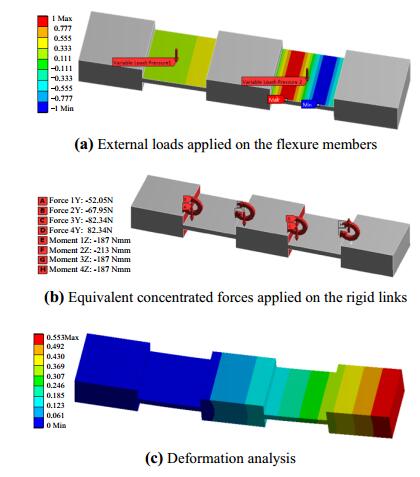
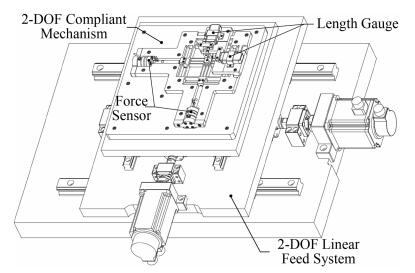
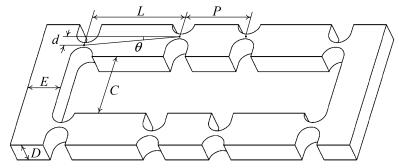
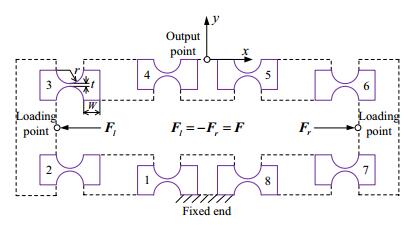
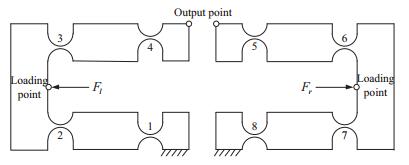
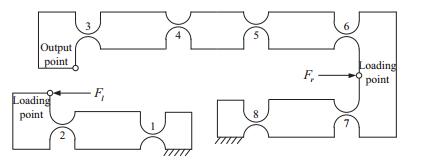
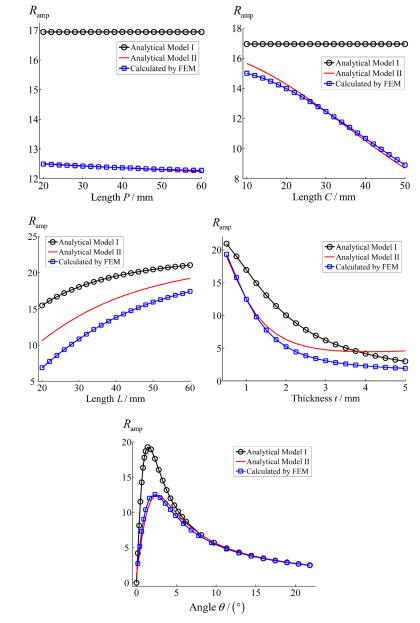
Analytical compliance model is vital to the flexure-based compliant mechanism in its mechanical design and motion control. The matrix is a common and effective approach in the compliance modeling while it is not well developed for the closed-loop serial and parallel compliant mechanisms and is not applicable to the situation when the external loads are applied on the flexure members. Concise and explicit analytical compliance models of the serial flexure-based compliant mechanisms under arbitrary loads are derived by using the matrix method. An equivalent method is proposed to deal with the situation when the external loads are applied on the flexure members. The external loads are transformed to concentrated forces applied on the rigid links, which satisfy the equations of static equilibrium and also guarantee that the deformations at the displacement output point remain unchanged. Then the matrix method can be still adopted for the compliance analysis of the compliant mechanism. Finally, several specific examples and an experimental test are given to verify the effectiveness of the compliance models and the force equivalent method. The research enriches the matrix method and provides concise analytical compliance models for the serial compliant mechanism.
Analytical compliance model is vital to the flexure-based compliant mechanism in its mechanical design and motion control. The matrix is a common and effective approach in the compliance modeling while it is not well developed for the closed-loop serial and parallel compliant mechanisms and is not applicable to the situation when the external loads are applied on the flexure members. Concise and explicit analytical compliance models of the serial flexure-based compliant mechanisms under arbitrary loads are derived by using the matrix method. An equivalent method is proposed to deal with the situation when the external loads are applied on the flexure members. The external loads are transformed to concentrated forces applied on the rigid links, which satisfy the equations of static equilibrium and also guarantee that the deformations at the displacement output point remain unchanged. Then the matrix method can be still adopted for the compliance analysis of the compliant mechanism. Finally, several specific examples and an experimental test are given to verify the effectiveness of the compliance models and the force equivalent method. The research enriches the matrix method and provides concise analytical compliance models for the serial compliant mechanism.

2017, 30(4): 963-972.
doi: 10.1007/s10033-017-0157-6
Abstract:
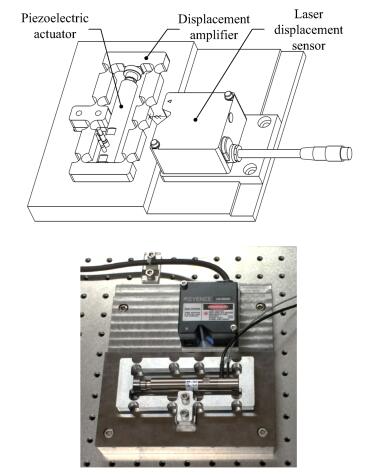
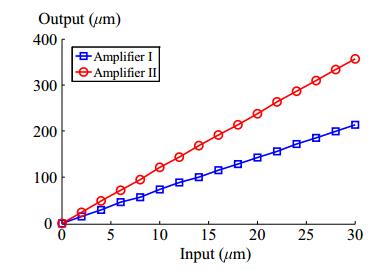
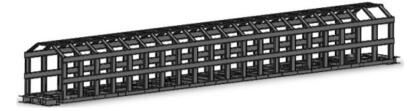
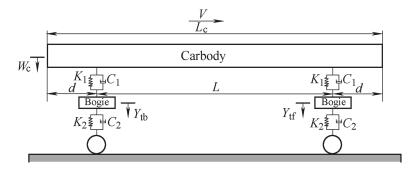
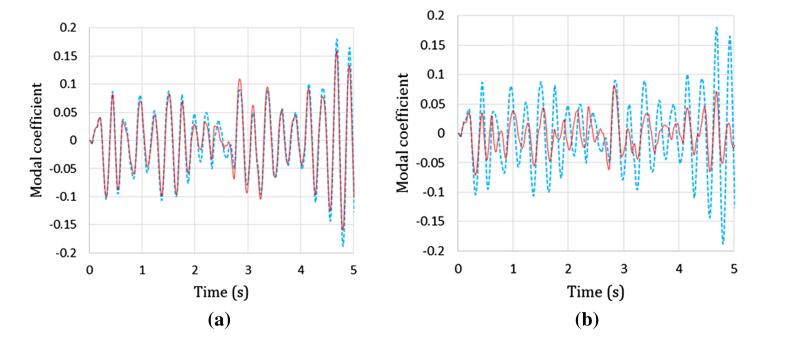
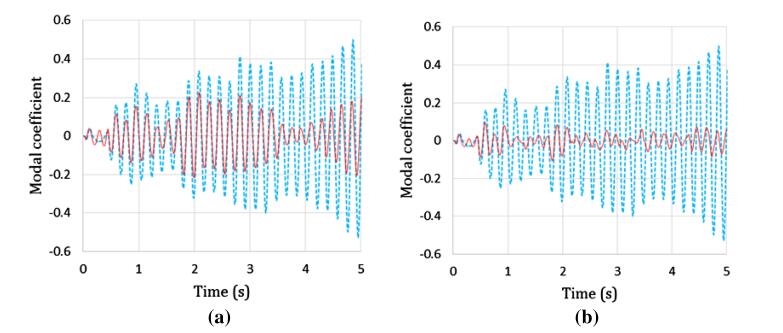
In recent years and according to modern transportation development, rail vehicles are manufactured lighter to achieve higher speed and lower transportation costs. On the other hand, weight reduction of rail vehicles leads to increase the structural vibration. In this study, Active Vibration Control of a rail vehicle using piezoelectric elements is investigated. The optimal control employed as the control approach regard to the first two modes of vibration. A simplified Car body structure is modeled in Matlab using the finite element theory by considering six DOF beam element and then the Eigen functions and mode shapes are derived. The surface roughness of different classes of rail tracks have been obtained using random vibration theory and applied to the secondary suspension as the excitation of the structure; Then piezoelectric mounted where the greatest moments were captured. The effectiveness of Piezoelectric in structural vibrations attenuation of car body is demonstrated through the state space equations and its effect on modal coefficient.
In recent years and according to modern transportation development, rail vehicles are manufactured lighter to achieve higher speed and lower transportation costs. On the other hand, weight reduction of rail vehicles leads to increase the structural vibration. In this study, Active Vibration Control of a rail vehicle using piezoelectric elements is investigated. The optimal control employed as the control approach regard to the first two modes of vibration. A simplified Car body structure is modeled in Matlab using the finite element theory by considering six DOF beam element and then the Eigen functions and mode shapes are derived. The surface roughness of different classes of rail tracks have been obtained using random vibration theory and applied to the secondary suspension as the excitation of the structure; Then piezoelectric mounted where the greatest moments were captured. The effectiveness of Piezoelectric in structural vibrations attenuation of car body is demonstrated through the state space equations and its effect on modal coefficient.

2017, 40(4): 973-981.
doi: 10.1007/s10033-017-0149-6
Abstract:
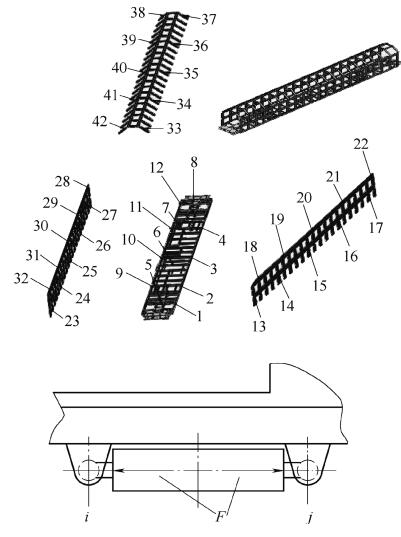
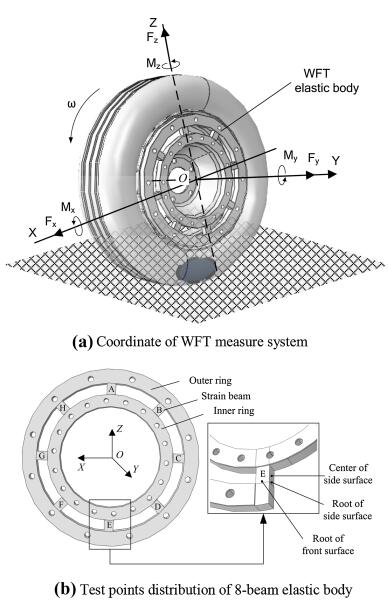
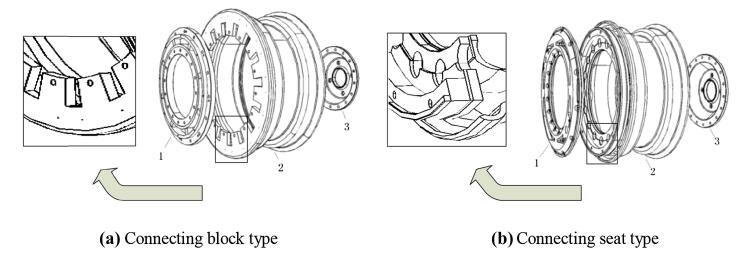
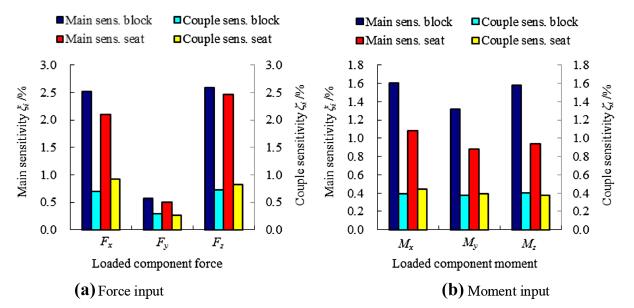
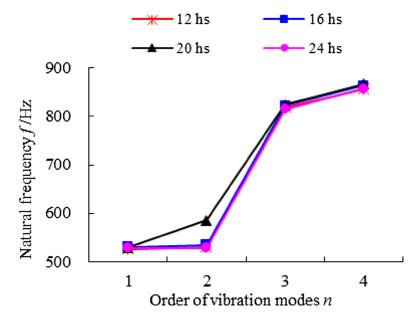
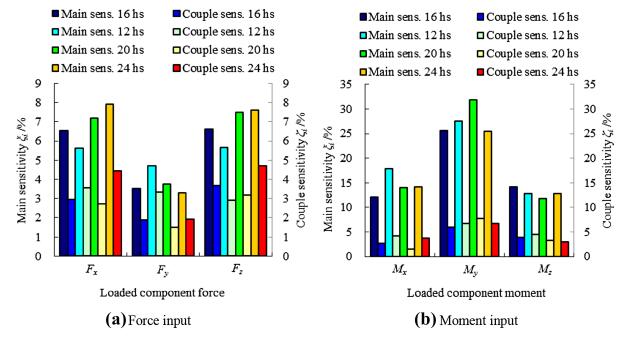
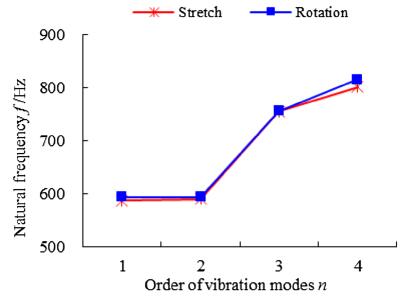
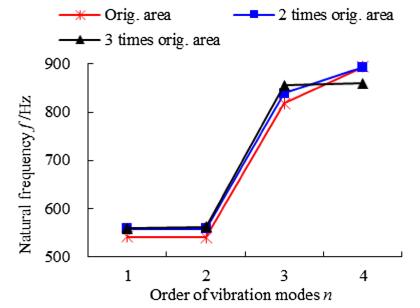
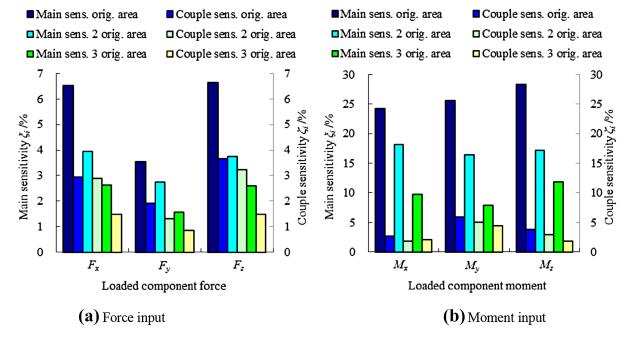
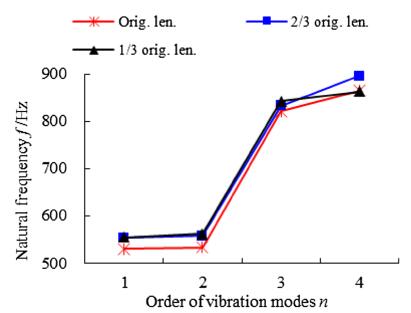
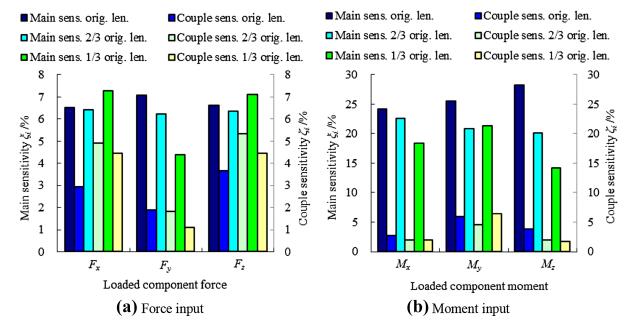
The current research of wheel force transducer (WFT) mainly focuses on test signal processing and decoupling methods based on signal itself, while the WFT structure optimization research related to decreasing the mass and increase the natural frequency and comprehensive sensitivity is not enough. In order to improve the WFT test accuracy, a structure optimization method based on natural frequency and comprehensive sensitivity indicators is put forward. The WFT with 8-beam elastic body is used for the finite element modeling (FEM), in which the following variations are taken into consideration: the connection type of elastic body with modified rim, the number of connection holes, and the respects of strain beam including the shape, the cross sectional area and the length, etc.. The test results shows that the natural frequency of the connecting block type is increased by 65.5% compared with the connecting seat type of elastic body & modified rim, and the main channel sensitivity is improved as well. The results show that the connecting block type will achieve the best comprehensive performance when the number of connecting holes between the elastic body and the modified rim is 20. And the thinner and longer strain beam with smaller cross section area is preferable within the scope of elastic body mechanical strength. This research proposes a novel structure optimization method for WFT which contributes to improve the measurement performance of WFT.
The current research of wheel force transducer (WFT) mainly focuses on test signal processing and decoupling methods based on signal itself, while the WFT structure optimization research related to decreasing the mass and increase the natural frequency and comprehensive sensitivity is not enough. In order to improve the WFT test accuracy, a structure optimization method based on natural frequency and comprehensive sensitivity indicators is put forward. The WFT with 8-beam elastic body is used for the finite element modeling (FEM), in which the following variations are taken into consideration: the connection type of elastic body with modified rim, the number of connection holes, and the respects of strain beam including the shape, the cross sectional area and the length, etc.. The test results shows that the natural frequency of the connecting block type is increased by 65.5% compared with the connecting seat type of elastic body & modified rim, and the main channel sensitivity is improved as well. The results show that the connecting block type will achieve the best comprehensive performance when the number of connecting holes between the elastic body and the modified rim is 20. And the thinner and longer strain beam with smaller cross section area is preferable within the scope of elastic body mechanical strength. This research proposes a novel structure optimization method for WFT which contributes to improve the measurement performance of WFT.


2017, 30(4): 982-990.
doi: 10.1007/s10033-017-0143-z
Abstract:
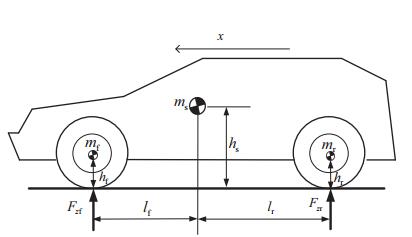
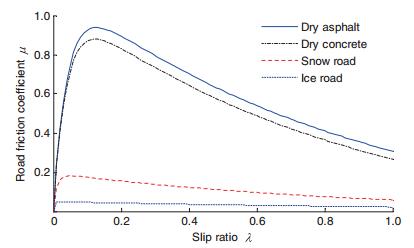
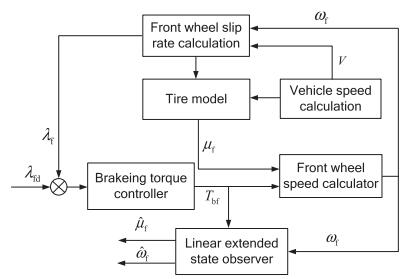
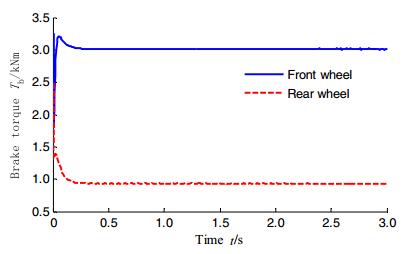
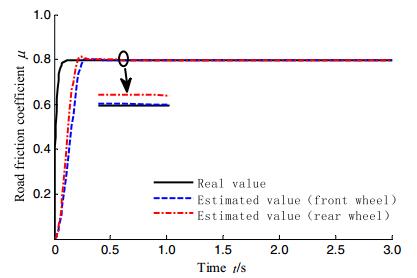
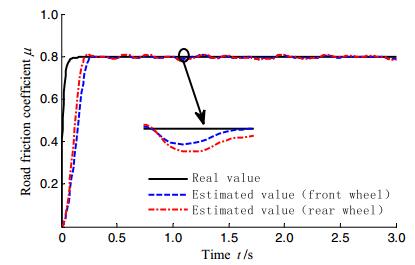
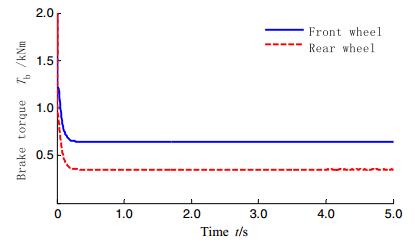
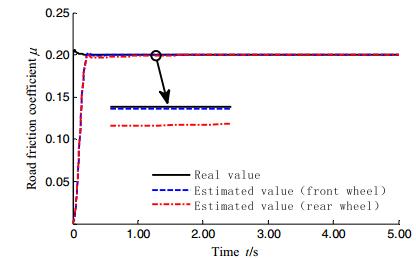
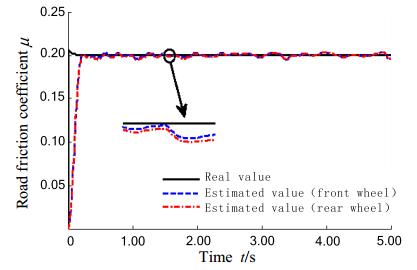
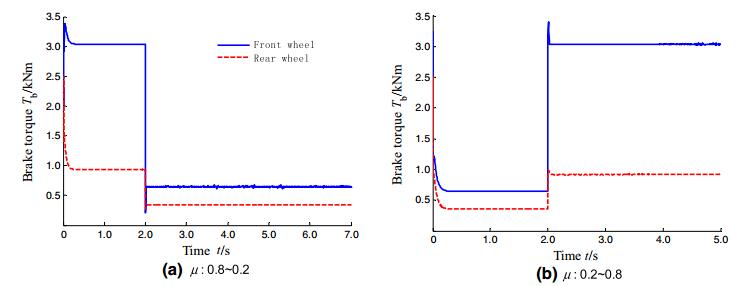
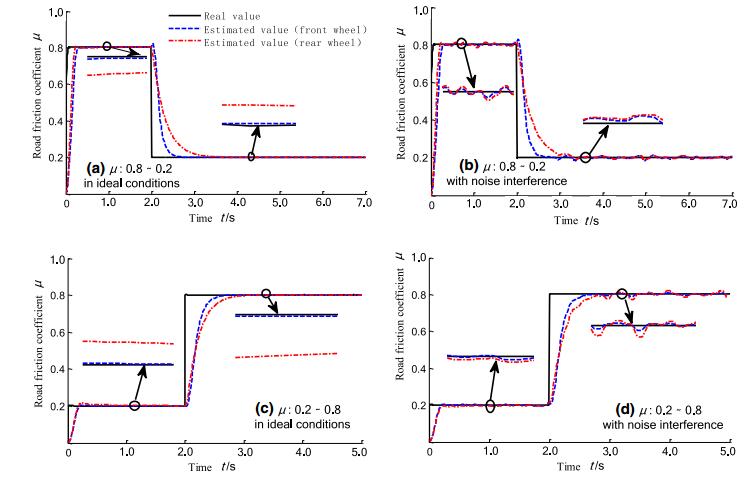
The accurate estimation of road friction coefficient in the active safety control system has become increasingly prominent. Most previous studies on road friction estimation have only used vehicle longitudinal or lateral dynamics and often ignored the load transfer, which tends to cause inaccurate of the actual road friction coefficient. A novel method considering load transfer of front and rear axles is proposed to estimate road friction coefficient based on braking dynamic model of two-wheeled vehicle. Sliding mode control technique is used to build the ideal braking torque controller, which control target is to control the actual wheel slip ratio of front and rear wheels tracking the ideal wheel slip ratio. In order to eliminate the chattering problem of the sliding mode controller, integral switching surface is used to design the sliding mode surface. A second order linear extended state observer is designed to observe road friction coefficient based on wheel speed and braking torque of front and rear wheels. The proposed road friction coefficient estimation schemes are evaluated by simulation in ADAMS/Car. The results show that the estimated values can well agree with the actual values in different road conditions. The observer can estimate road friction coefficient exactly in real-time and resist external disturbance. The proposed research provides a novel method to estimate road friction coefficient with strong robustness and more accurate.
The accurate estimation of road friction coefficient in the active safety control system has become increasingly prominent. Most previous studies on road friction estimation have only used vehicle longitudinal or lateral dynamics and often ignored the load transfer, which tends to cause inaccurate of the actual road friction coefficient. A novel method considering load transfer of front and rear axles is proposed to estimate road friction coefficient based on braking dynamic model of two-wheeled vehicle. Sliding mode control technique is used to build the ideal braking torque controller, which control target is to control the actual wheel slip ratio of front and rear wheels tracking the ideal wheel slip ratio. In order to eliminate the chattering problem of the sliding mode controller, integral switching surface is used to design the sliding mode surface. A second order linear extended state observer is designed to observe road friction coefficient based on wheel speed and braking torque of front and rear wheels. The proposed road friction coefficient estimation schemes are evaluated by simulation in ADAMS/Car. The results show that the estimated values can well agree with the actual values in different road conditions. The observer can estimate road friction coefficient exactly in real-time and resist external disturbance. The proposed research provides a novel method to estimate road friction coefficient with strong robustness and more accurate.
2017, 30(4): 991-1007.
doi: 10.1007/s10033-017-0140-2
Abstract:
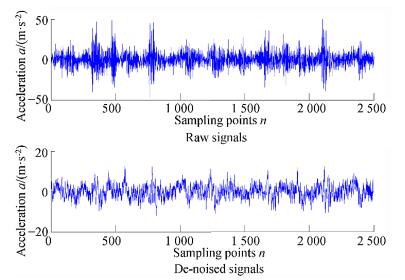
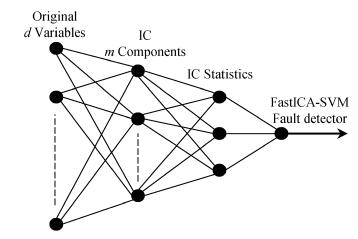
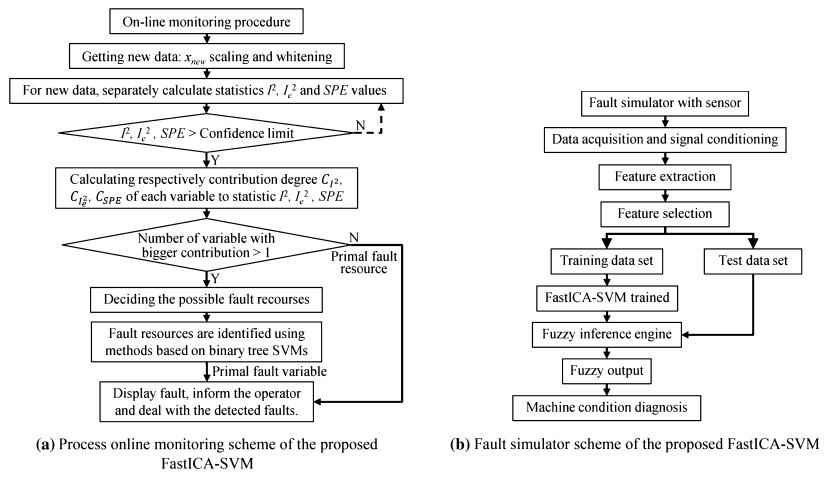
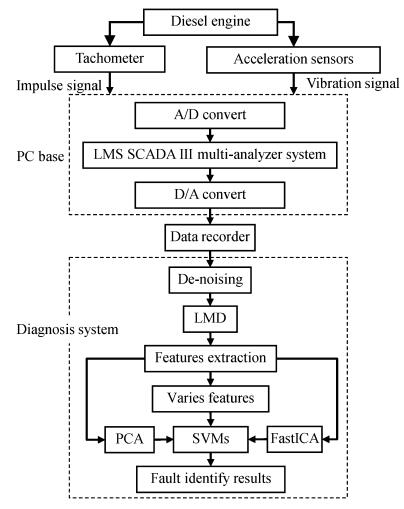
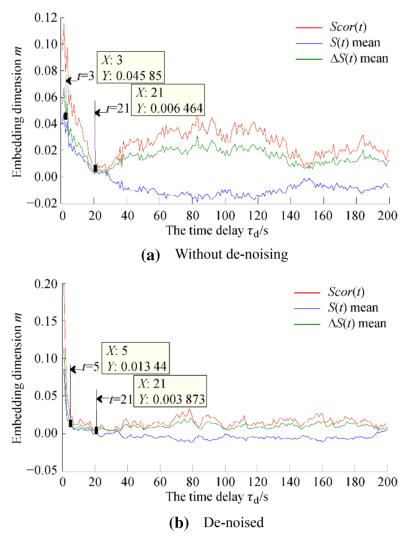
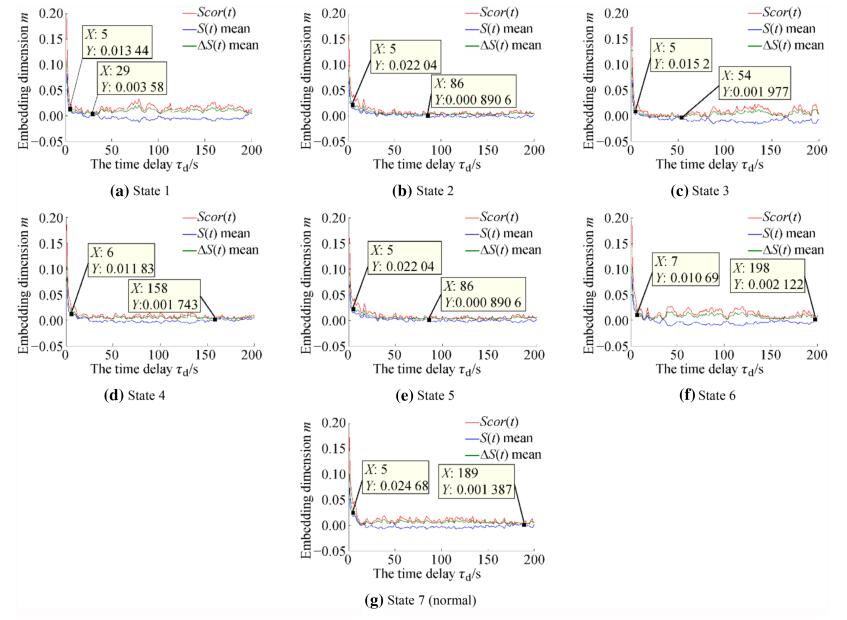
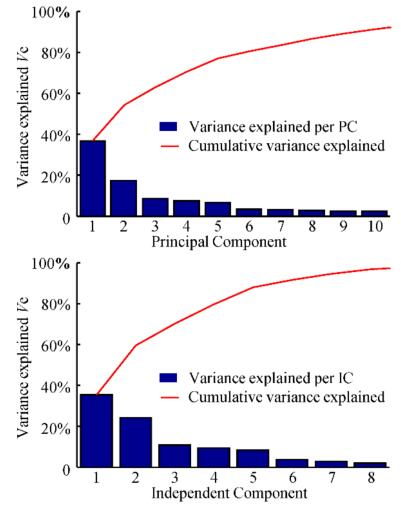
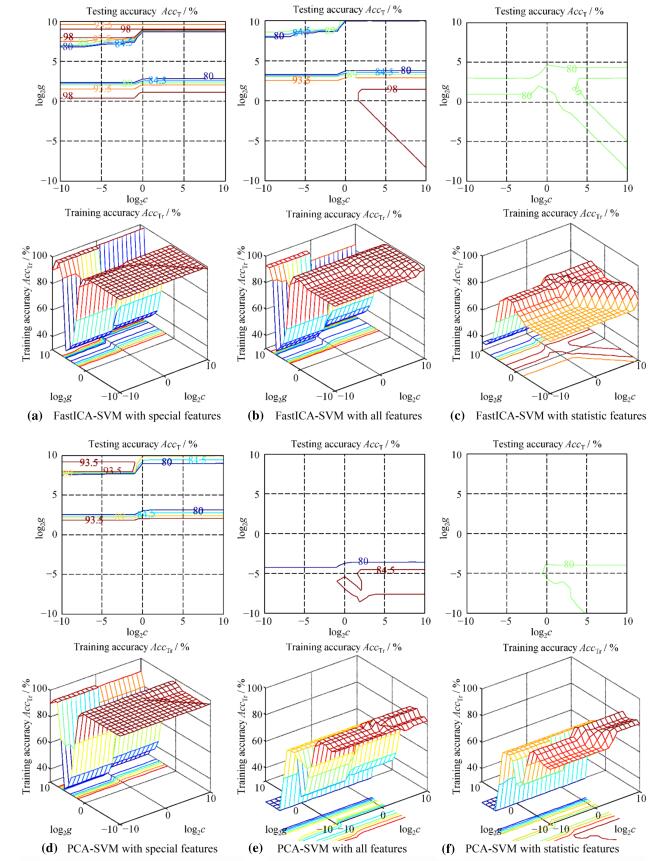
Numerous vibration-based techniques are rarely used in diesel engines fault diagnosis in a direct way, due to the surface vibration signals of diesel engines with the complex non-stationary and nonlinear time-varying features. To investigate the fault diagnosis of diesel engines, fractal correlation dimension, wavelet energy and entropy as features reflecting the diesel engine fault fractal and energy characteristics are extracted from the decomposed signals through analyzing vibration acceleration signals derived from the cylinder head in seven different states of valve train. An intelligent fault detector FastICA-SVM is applied for diesel engine fault diagnosis and classification. The results demonstrate that FastICA-SVM achieves higher classification accuracy and makes better generalization performance in small samples recognition. Besides, the fractal correlation dimension and wavelet energy and entropy as the special features of diesel engine vibration signal are considered as input vectors of classifier FastICASVM and could produce the excellent classification results. The proposed methodology improves the accuracy of feature extraction and the fault diagnosis of diesel engines.
Numerous vibration-based techniques are rarely used in diesel engines fault diagnosis in a direct way, due to the surface vibration signals of diesel engines with the complex non-stationary and nonlinear time-varying features. To investigate the fault diagnosis of diesel engines, fractal correlation dimension, wavelet energy and entropy as features reflecting the diesel engine fault fractal and energy characteristics are extracted from the decomposed signals through analyzing vibration acceleration signals derived from the cylinder head in seven different states of valve train. An intelligent fault detector FastICA-SVM is applied for diesel engine fault diagnosis and classification. The results demonstrate that FastICA-SVM achieves higher classification accuracy and makes better generalization performance in small samples recognition. Besides, the fractal correlation dimension and wavelet energy and entropy as the special features of diesel engine vibration signal are considered as input vectors of classifier FastICASVM and could produce the excellent classification results. The proposed methodology improves the accuracy of feature extraction and the fault diagnosis of diesel engines.

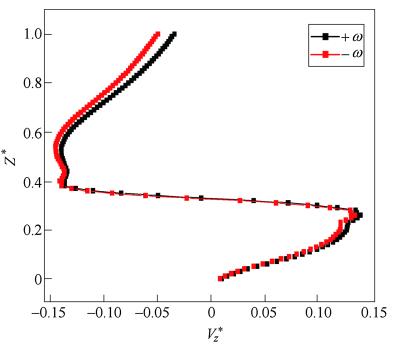
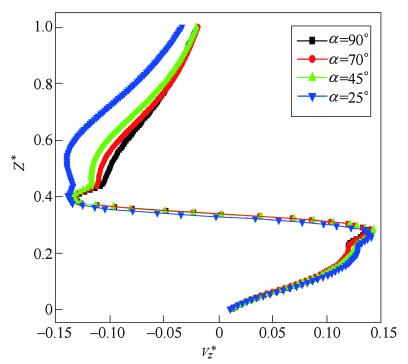
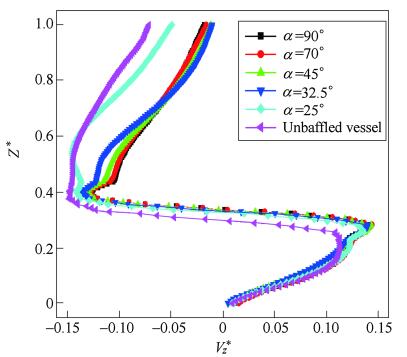
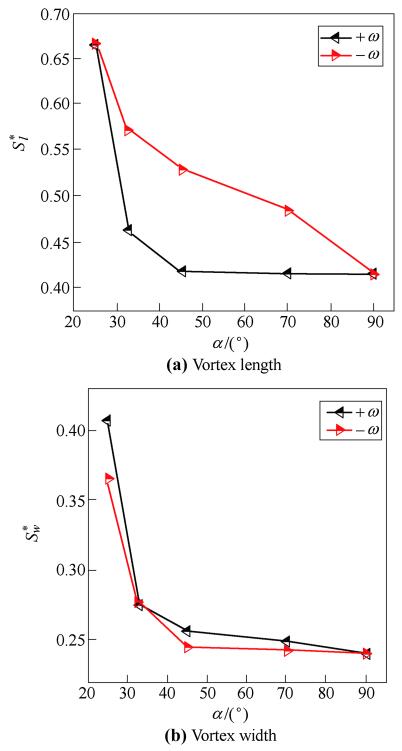
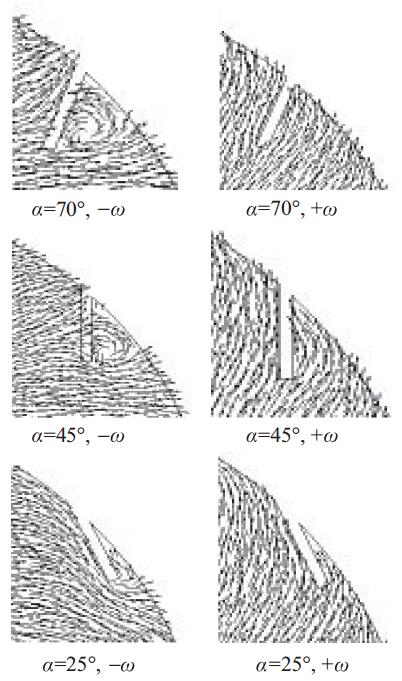
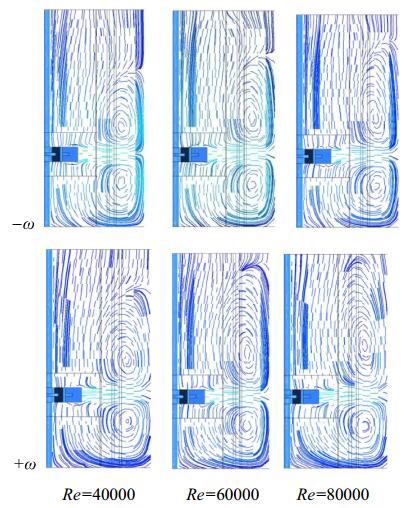
Effect of the Inclination of Baffles on the Power Consumption and Fluid Flows in a Vessel Stirred by
2017, 30(4): 1008-1016.
doi: 10.1007/s10033-017-0158-5
Abstract:
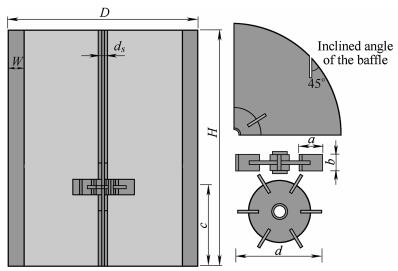
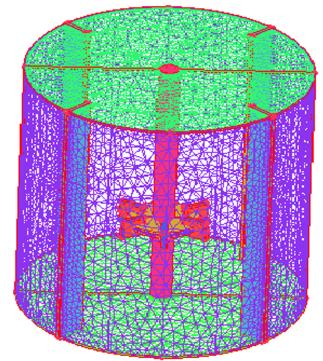
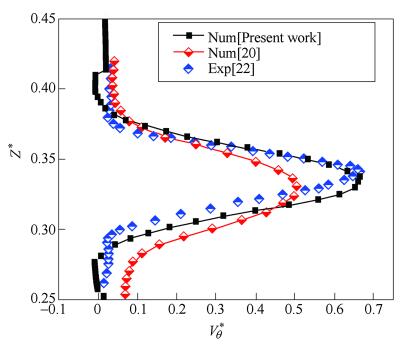
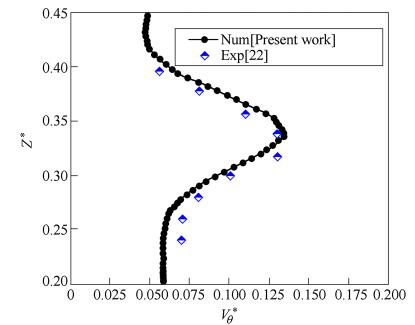
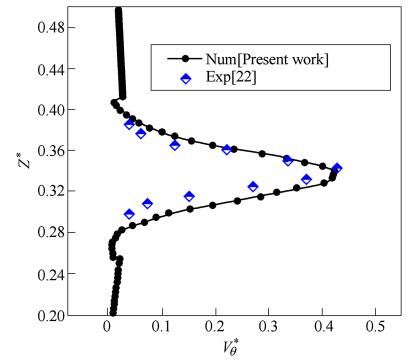
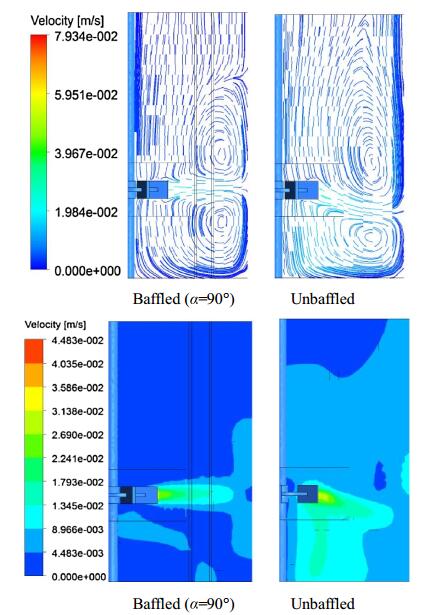
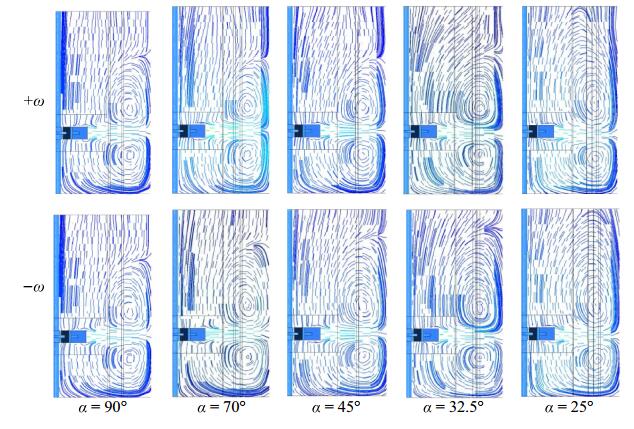
The role of baffles in mechanically stirred tanks is to promote the stability of power drawn by the impeller and to avoid the fluid swirling, thus enhancing mixing. The present paper numerically investigates the baffles effects in a vessel stirred by a Rushton turbine. The geometric factor of interest is the baffle inclination which is varying between 25°, 32.5°, 45°, 70° and 90° at different impeller rotational speeds. The impeller rotational direction has also been varied. The vortex size and power consumption were evaluated for each geometrical configuration. It was found that the best configuration is the baffle inclination by α = 70° at a negative angular velocity.
The role of baffles in mechanically stirred tanks is to promote the stability of power drawn by the impeller and to avoid the fluid swirling, thus enhancing mixing. The present paper numerically investigates the baffles effects in a vessel stirred by a Rushton turbine. The geometric factor of interest is the baffle inclination which is varying between 25°, 32.5°, 45°, 70° and 90° at different impeller rotational speeds. The impeller rotational direction has also been varied. The vortex size and power consumption were evaluated for each geometrical configuration. It was found that the best configuration is the baffle inclination by α = 70° at a negative angular velocity.

2017, 30(4): 1017-1024.
doi: 10.1007/s10033-017-0156-7
Abstract:
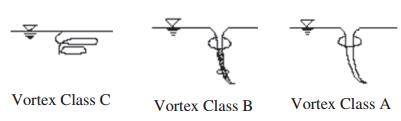
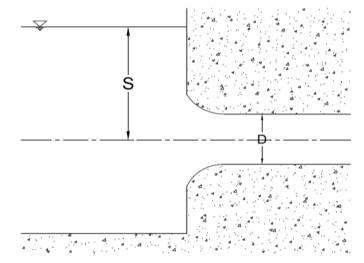
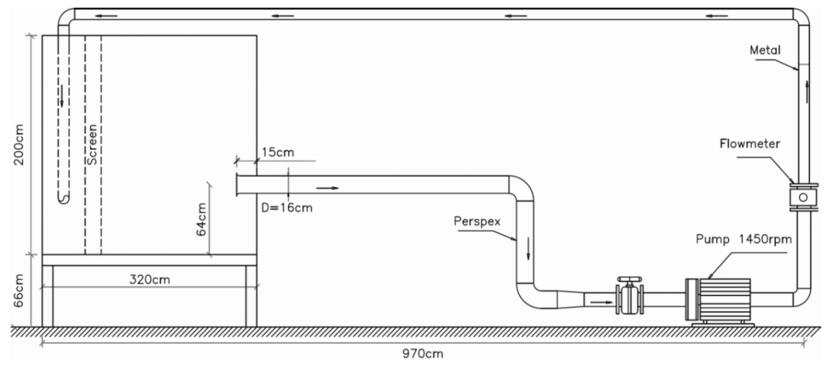
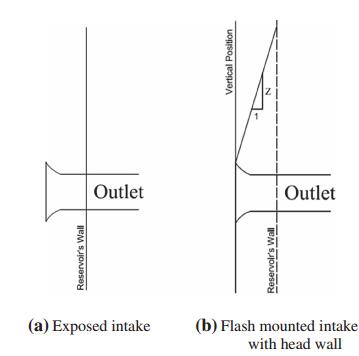
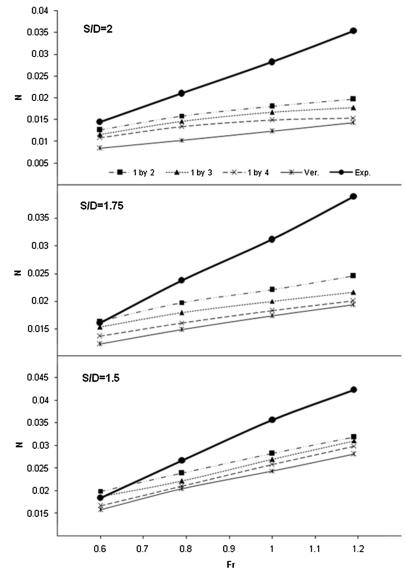
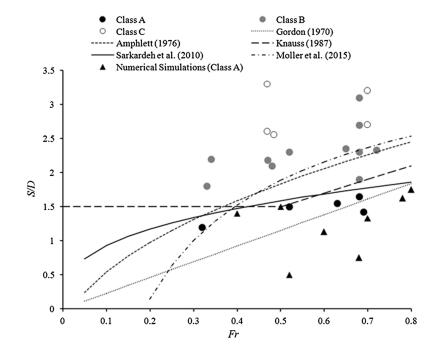
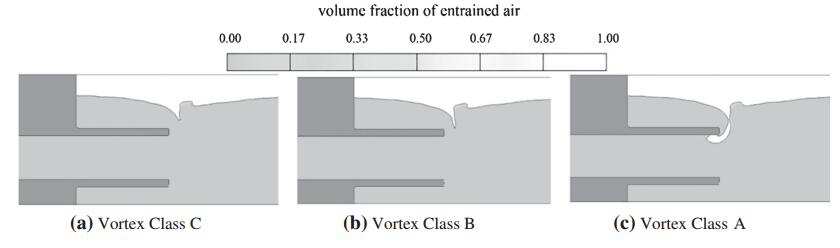
Vortex formation over the intakes is an undesirable phenomenon within the water withdrawal process from a dam reservoir. Calculating the minimum operating water level in power intakes by empirical equations is not a safe way and sometimes contains some errors. Therefore, current method to calculate the critical submergence of a power intake is construction of a scaled physical model in parallel with numerical model. In this research some proposed empirical relations for prediction of submergence depth in power intakes were validated with experimental data of different physical and numerical models of power intakes. Results showed that, equations which involved the geometry of intake have better correspondence with the experimental and numerical data.
Vortex formation over the intakes is an undesirable phenomenon within the water withdrawal process from a dam reservoir. Calculating the minimum operating water level in power intakes by empirical equations is not a safe way and sometimes contains some errors. Therefore, current method to calculate the critical submergence of a power intake is construction of a scaled physical model in parallel with numerical model. In this research some proposed empirical relations for prediction of submergence depth in power intakes were validated with experimental data of different physical and numerical models of power intakes. Results showed that, equations which involved the geometry of intake have better correspondence with the experimental and numerical data.

2017, 30(4): 1025-1031.
doi: 10.1007/s10033-017-0137-x
Abstract:
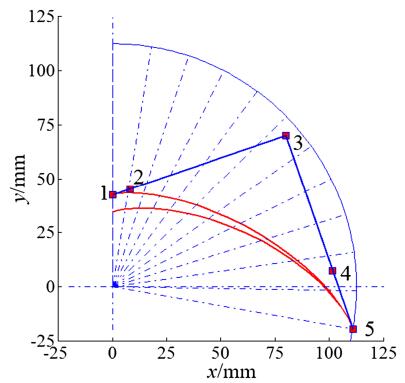
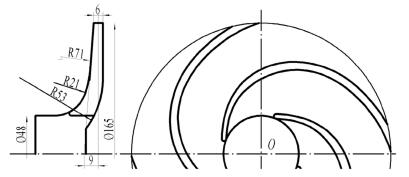
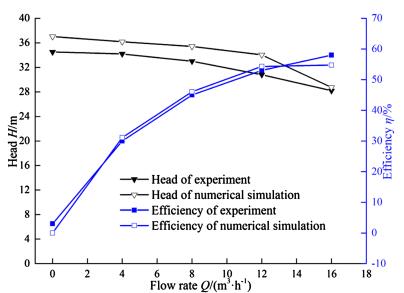
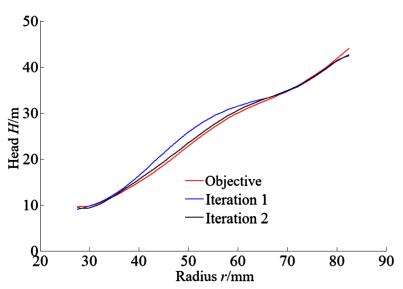
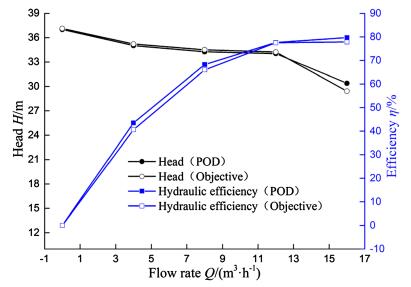
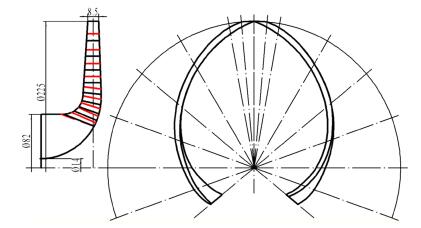
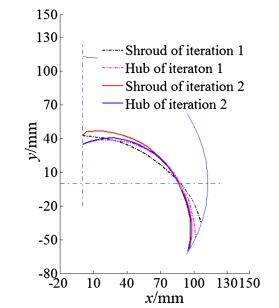
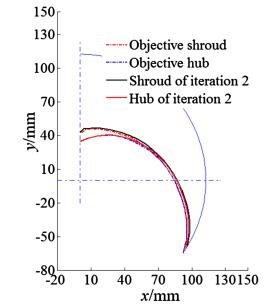
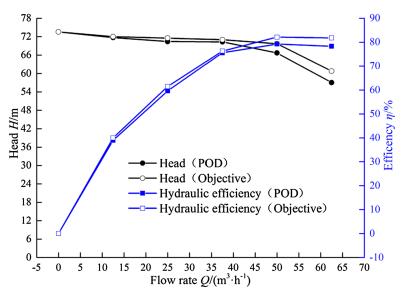
To improve the accuracy and reduce the calculation cost for the inverse problem of centrifugal pump impeller, the new inverse method based on proper orthogonal decomposition (POD) is proposed. The pump blade shape is parameterized by quartic Bezier curve, and the initial snapshots is generated by introducing the perturbation of the blade shape control parameters. The internal flow field and its hydraulic performance is predicted by CFD method. The snapshots vector includes the blade shape parameter and the distribution of blade load. The POD basis for the snapshots set are deduced by proper orthogonal decomposition. The sample vector set is expressed in terms of the linear combination of the orthogonal basis. The objective blade shape corresponding to the objective distribution of blade load is obtained by least square fit. The Iterative correction algorithm for the centrifugal pump blade inverse method based on POD is proposed. The objective blade load distributions are corrected according to the difference of the CFD result and the POD result. The two dimensional and three dimensional blade calculation cases show that the proposed centrifugal pump blade inverse method based on POD have good convergence and high accuracy, and the calculation cost is greatly reduced. After two iterations, the deviation of the blade load and the pump hydraulic performance are limited within 4.0% and 6.0% individually for most of the flow rate range. This paper provides a promising inverse method for centrifugal pump impeller, which will benefit the hydraulic optimization of centrifugal pump.
To improve the accuracy and reduce the calculation cost for the inverse problem of centrifugal pump impeller, the new inverse method based on proper orthogonal decomposition (POD) is proposed. The pump blade shape is parameterized by quartic Bezier curve, and the initial snapshots is generated by introducing the perturbation of the blade shape control parameters. The internal flow field and its hydraulic performance is predicted by CFD method. The snapshots vector includes the blade shape parameter and the distribution of blade load. The POD basis for the snapshots set are deduced by proper orthogonal decomposition. The sample vector set is expressed in terms of the linear combination of the orthogonal basis. The objective blade shape corresponding to the objective distribution of blade load is obtained by least square fit. The Iterative correction algorithm for the centrifugal pump blade inverse method based on POD is proposed. The objective blade load distributions are corrected according to the difference of the CFD result and the POD result. The two dimensional and three dimensional blade calculation cases show that the proposed centrifugal pump blade inverse method based on POD have good convergence and high accuracy, and the calculation cost is greatly reduced. After two iterations, the deviation of the blade load and the pump hydraulic performance are limited within 4.0% and 6.0% individually for most of the flow rate range. This paper provides a promising inverse method for centrifugal pump impeller, which will benefit the hydraulic optimization of centrifugal pump.


2017, 30(4): 1032-1043.
doi: 10.1007/s10033-017-0146-9
Abstract:
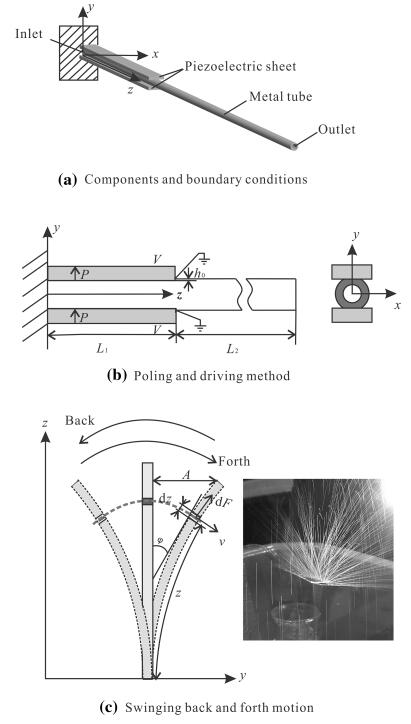
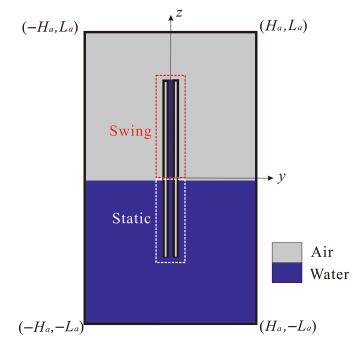
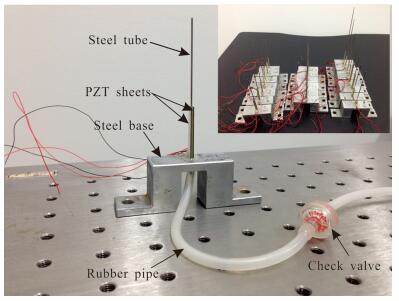
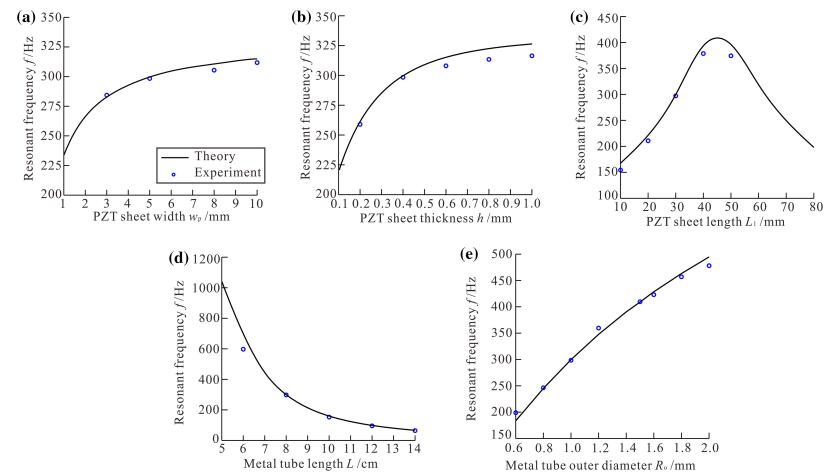
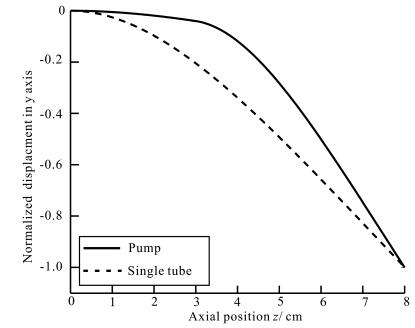
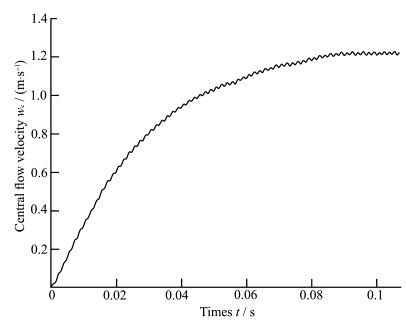
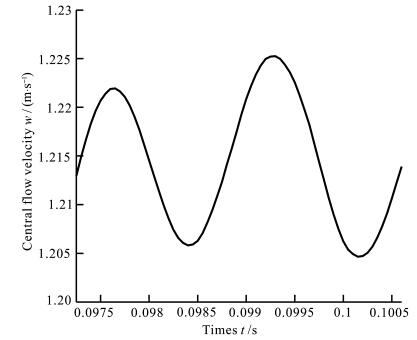
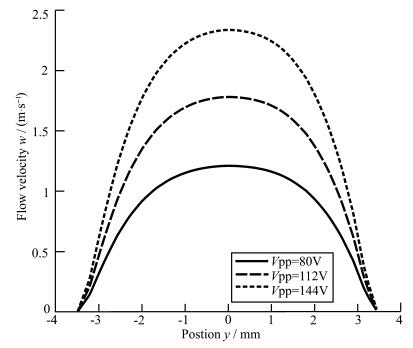
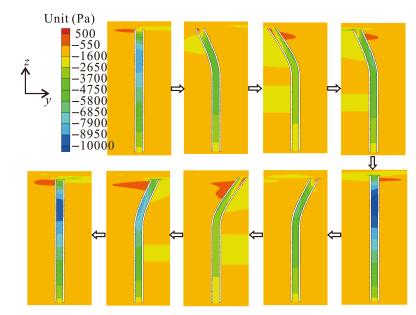
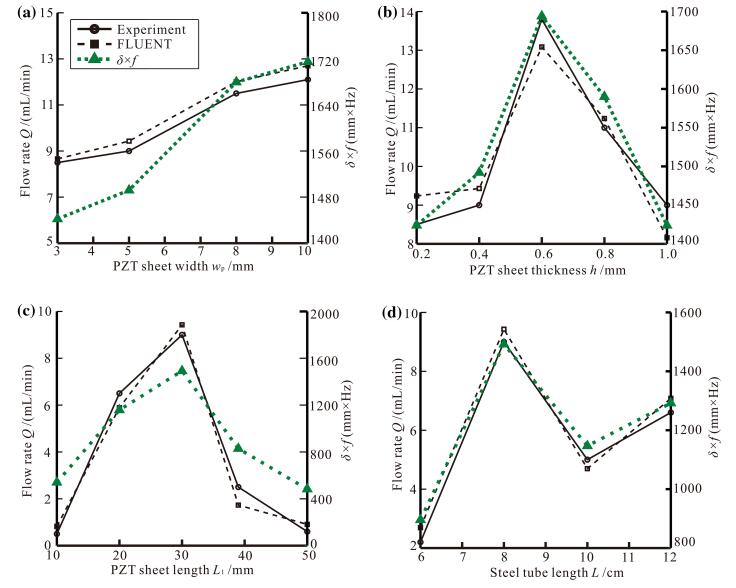
A piezoelectric centrifugal pump was developed previously to overcome the low frequency responses of piezoelectric pumps with check valves and liquid reflux of conventional valveless piezoelectric pumps. However, the electro-mechanical-fluidic analysis on this pump has not been done. Therefore, multi-field analysis and experimental verification on piezoelectrically actuated centrifugal valveless pumps are conducted for liquid transport applications. The valveless pump consists of two piezoelectric sheets and a metal tube with piezoelectric elements pushing the metal tube to swing at the first bending resonant frequency. The centrifugal force generated by the swinging motion will force the liquid out of the metal tube. The governing equations for the solid and fluid domains are established, and the coupling relations of the mechanical, electrical and fluid fields are described. The bending resonant frequency and bending mode in solid domain are discussed, and the liquid flow rate, velocity profile, and gauge pressure are investigated in fluid domain. The working frequency and flow rate concerning different components sizes are analyzed and verified through experiments to guide the pump design. A fabricated prototype with an outer diameter of 2.2 mm and a length of 80 mm produced the largest flow rate of 13.8 mL/min at backpressure of 0.8 kPa with driving voltage of 80 Vpp. By solving the electro-mechanical-fluidic coupling problem, the model developed can provide theoretical guidance on the optimization of centrifugal valveless pump characters.
A piezoelectric centrifugal pump was developed previously to overcome the low frequency responses of piezoelectric pumps with check valves and liquid reflux of conventional valveless piezoelectric pumps. However, the electro-mechanical-fluidic analysis on this pump has not been done. Therefore, multi-field analysis and experimental verification on piezoelectrically actuated centrifugal valveless pumps are conducted for liquid transport applications. The valveless pump consists of two piezoelectric sheets and a metal tube with piezoelectric elements pushing the metal tube to swing at the first bending resonant frequency. The centrifugal force generated by the swinging motion will force the liquid out of the metal tube. The governing equations for the solid and fluid domains are established, and the coupling relations of the mechanical, electrical and fluid fields are described. The bending resonant frequency and bending mode in solid domain are discussed, and the liquid flow rate, velocity profile, and gauge pressure are investigated in fluid domain. The working frequency and flow rate concerning different components sizes are analyzed and verified through experiments to guide the pump design. A fabricated prototype with an outer diameter of 2.2 mm and a length of 80 mm produced the largest flow rate of 13.8 mL/min at backpressure of 0.8 kPa with driving voltage of 80 Vpp. By solving the electro-mechanical-fluidic coupling problem, the model developed can provide theoretical guidance on the optimization of centrifugal valveless pump characters.

 E-mail Alerts
E-mail Alerts
