

2017 Vol.30(6)
Display Mode: |
2017, 30(6): 1283-1284.
doi: 10.1007/s10033-017-0197-y
Abstract:
2017, 30(6): 1285-1295.
doi: 10.1007/s10033-017-0185-2
Abstract:
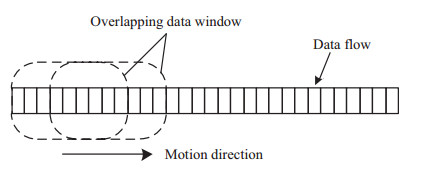
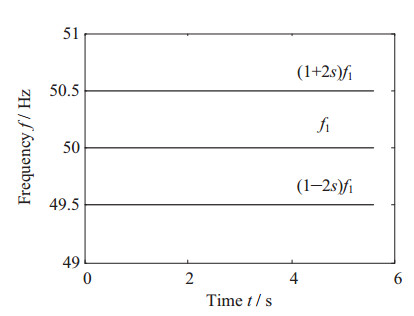
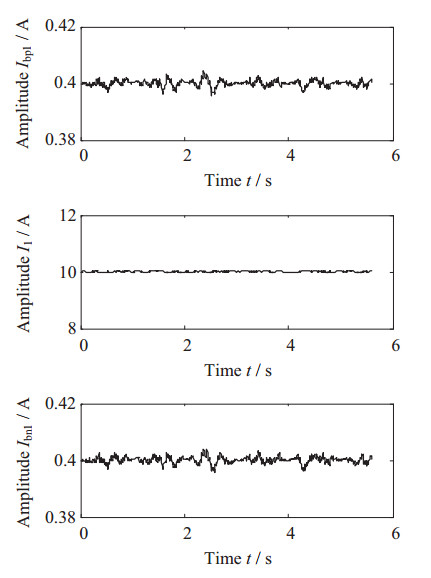
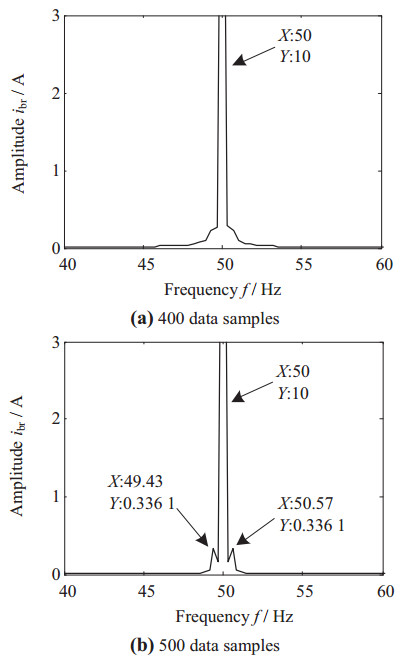
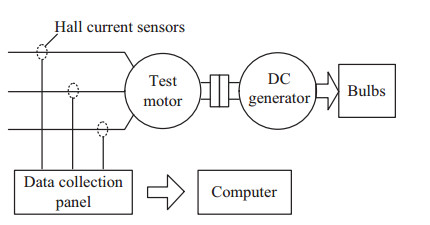
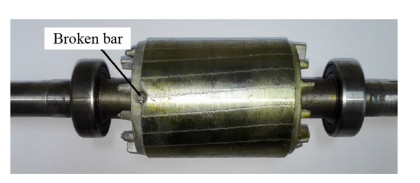
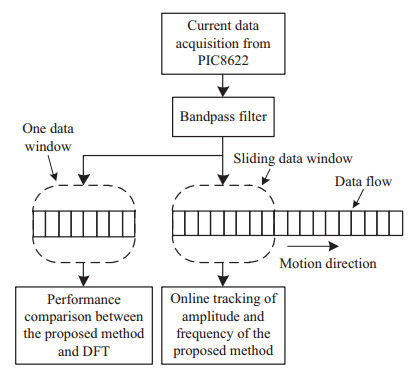
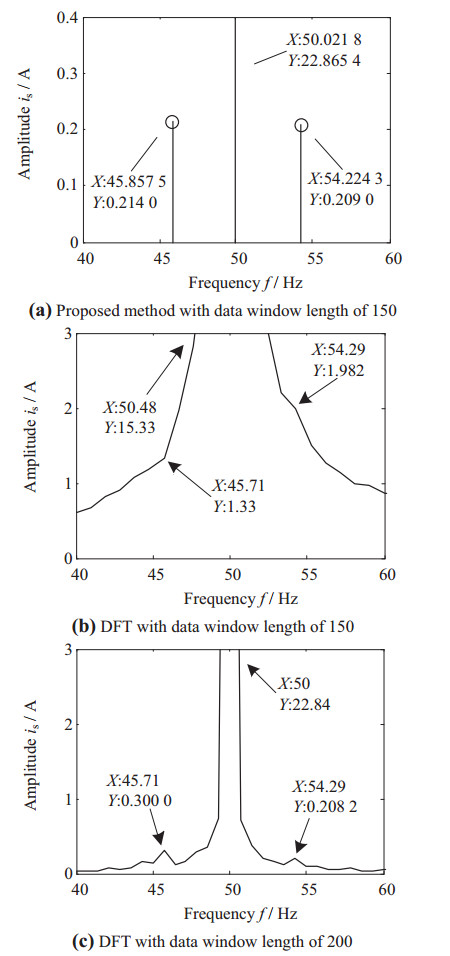
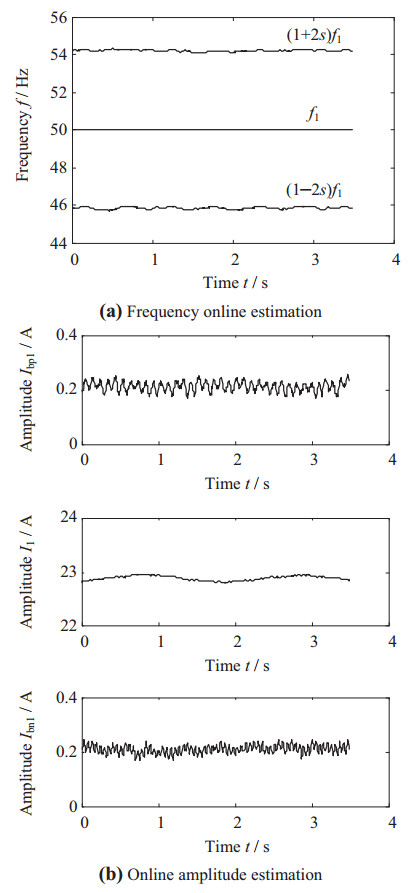
Current research in broken rotor bar (BRB) fault detection in induction motors is primarily focused on a high-frequency resolution analysis of the stator current. Compared with a discrete Fourier transformation, the parametric spectrum estimation technique has a higher frequency accuracy and resolution. However, the existing detection methods based on parametric spectrum estimation cannot realize online detection, owing to the large computational cost. To improve the efficiency of BRB fault detection, a new detection method based on the min-norm algorithm and least square estimation is proposed in this paper. First, the stator current is filtered using a band-pass filter and divided into short overlapped data windows. The min-norm algorithm is then applied to determine the frequencies of the fundamental and fault characteristic components with each overlapped data window. Next, based on the frequency values obtained, a model of the fault current signal is constructed. Subsequently, a linear least squares problem solved through singular value decomposition is designed to estimate the amplitudes and phases of the related components. Finally, the proposed method is applied to a simulated current and an actual motor, the results of which indicate that, not only parametric spectrum estimation technique.
Current research in broken rotor bar (BRB) fault detection in induction motors is primarily focused on a high-frequency resolution analysis of the stator current. Compared with a discrete Fourier transformation, the parametric spectrum estimation technique has a higher frequency accuracy and resolution. However, the existing detection methods based on parametric spectrum estimation cannot realize online detection, owing to the large computational cost. To improve the efficiency of BRB fault detection, a new detection method based on the min-norm algorithm and least square estimation is proposed in this paper. First, the stator current is filtered using a band-pass filter and divided into short overlapped data windows. The min-norm algorithm is then applied to determine the frequencies of the fundamental and fault characteristic components with each overlapped data window. Next, based on the frequency values obtained, a model of the fault current signal is constructed. Subsequently, a linear least squares problem solved through singular value decomposition is designed to estimate the amplitudes and phases of the related components. Finally, the proposed method is applied to a simulated current and an actual motor, the results of which indicate that, not only parametric spectrum estimation technique.
2017, 30(6): 1296-1304.
doi: 10.1007/s10033-017-0192-3
Abstract:
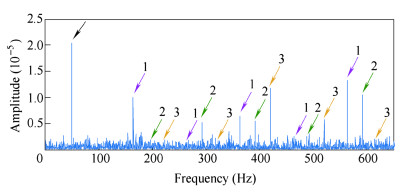
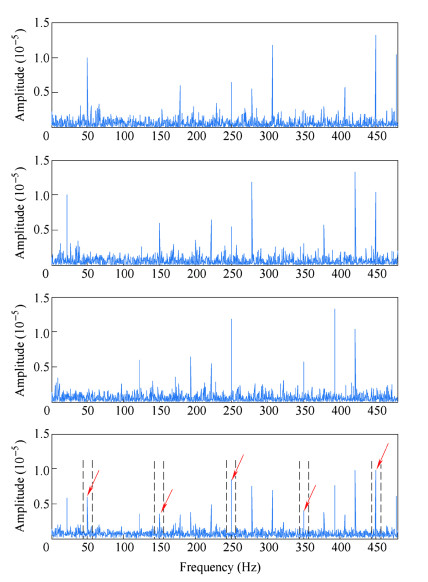
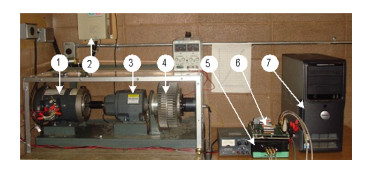
Induction motors (IMs) are commonly used in various industrial applications. To improve energy consumption efficiency, a reliable IM health condition monitoring system is very useful to detect IM fault at its earliest stage to prevent operation degradation, and malfunction of IMs. An intelligent harmonic synthesis technique is proposed in this work to conduct incipient air-gap eccentricity fault detection in IMs. The fault harmonic series are synthesized to enhance fault features. Fault related local spectra are processed to derive fault indicators for IM airgap eccentricity diagnosis. The effectiveness of the proposed harmonic synthesis technique is examined experimentally by IMs with static air-gap eccentricity and dynamic air-gap eccentricity states under different load conditions. Test results show that the developed harmonic synthesis technique can extract fault features effectively for initial IM air-gap eccentricity fault detection.
Induction motors (IMs) are commonly used in various industrial applications. To improve energy consumption efficiency, a reliable IM health condition monitoring system is very useful to detect IM fault at its earliest stage to prevent operation degradation, and malfunction of IMs. An intelligent harmonic synthesis technique is proposed in this work to conduct incipient air-gap eccentricity fault detection in IMs. The fault harmonic series are synthesized to enhance fault features. Fault related local spectra are processed to derive fault indicators for IM airgap eccentricity diagnosis. The effectiveness of the proposed harmonic synthesis technique is examined experimentally by IMs with static air-gap eccentricity and dynamic air-gap eccentricity states under different load conditions. Test results show that the developed harmonic synthesis technique can extract fault features effectively for initial IM air-gap eccentricity fault detection.
2017, 30(6): 1305-1313.
doi: 10.1007/s10033-017-0186-1
Abstract:
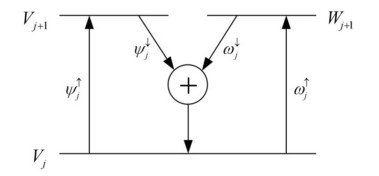
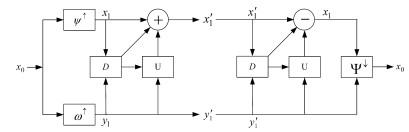
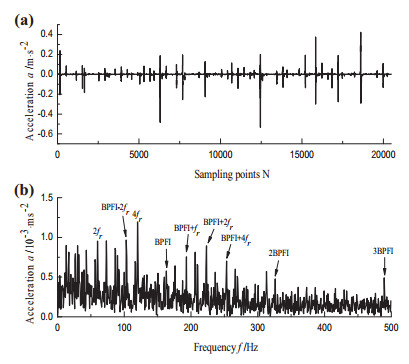
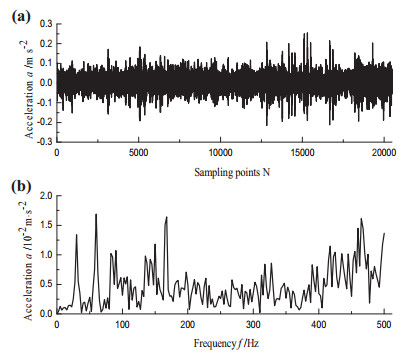
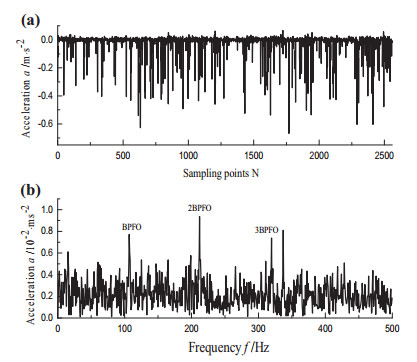
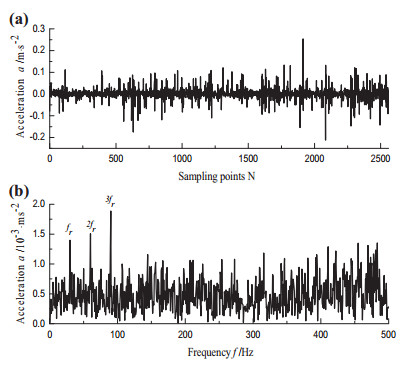
The current morphological wavelet technologies utilize a fixed filter or a linear decomposition algorithm, which cannot cope with the sudden changes, such as impulses or edges in a signal effectively. This paper presents a novel signal processing scheme, adaptive morphological update lifting wavelet (AMULW), for rolling element bearing fault detection. In contrast with the widely used morphological wavelet, the filters in AMULW are no longer fixed. Instead, the AMULW adaptively uses a morphological dilation-erosion filter or an average filter as the update lifting filter to modify the approximation signal. Moreover, the nonlinear morphological filter is utilized to substitute the traditional linear filter in AMULW. The effectiveness of the proposed AMULW is evaluated using a simulated vibration signal and experimental vibration signals collected from a bearing test rig. Results show that the proposed method has a superior performance in extracting fault features of defective rolling element bearings.
The current morphological wavelet technologies utilize a fixed filter or a linear decomposition algorithm, which cannot cope with the sudden changes, such as impulses or edges in a signal effectively. This paper presents a novel signal processing scheme, adaptive morphological update lifting wavelet (AMULW), for rolling element bearing fault detection. In contrast with the widely used morphological wavelet, the filters in AMULW are no longer fixed. Instead, the AMULW adaptively uses a morphological dilation-erosion filter or an average filter as the update lifting filter to modify the approximation signal. Moreover, the nonlinear morphological filter is utilized to substitute the traditional linear filter in AMULW. The effectiveness of the proposed AMULW is evaluated using a simulated vibration signal and experimental vibration signals collected from a bearing test rig. Results show that the proposed method has a superior performance in extracting fault features of defective rolling element bearings.
2017, 30(6): 1314-1324.
doi: 10.1007/s10033-017-0188-z
Abstract:
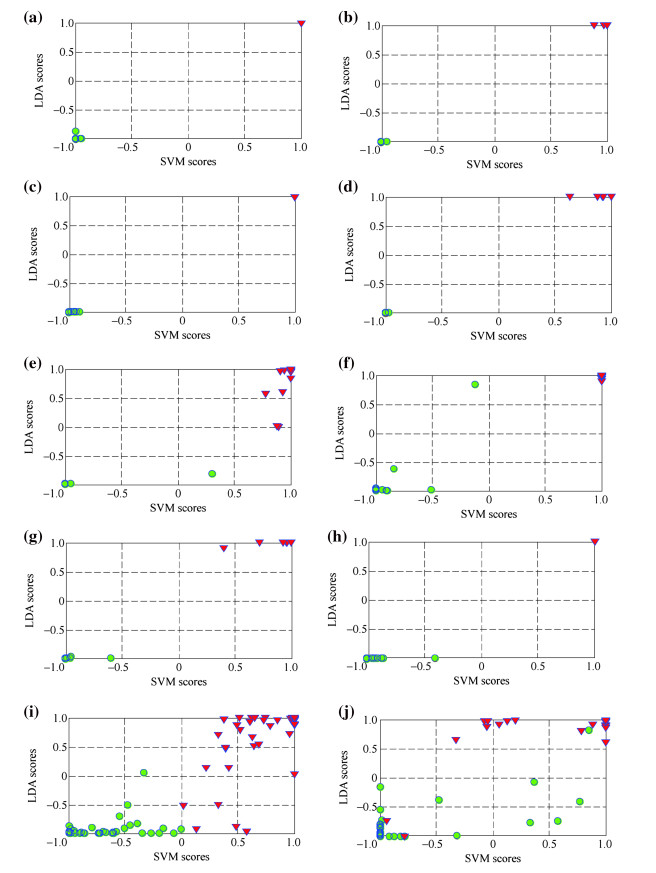
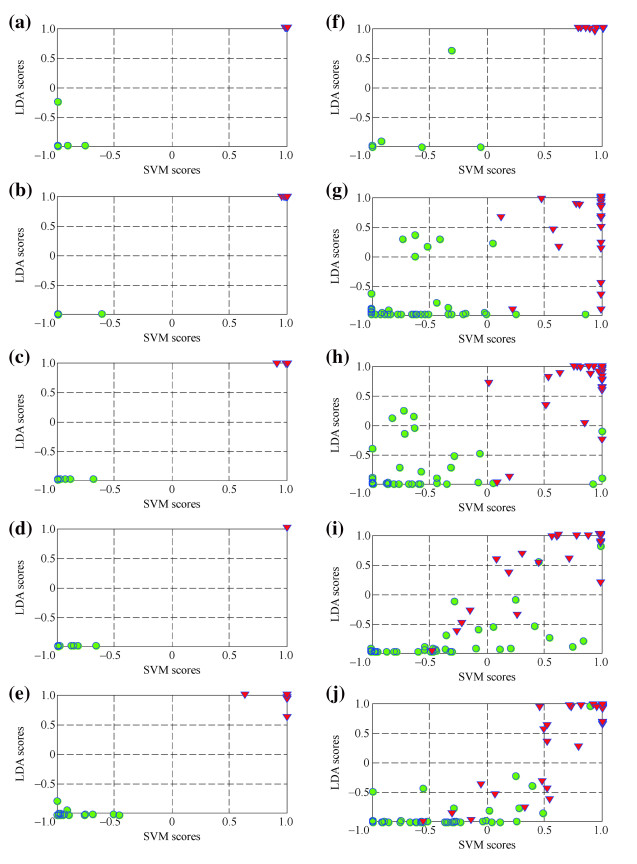
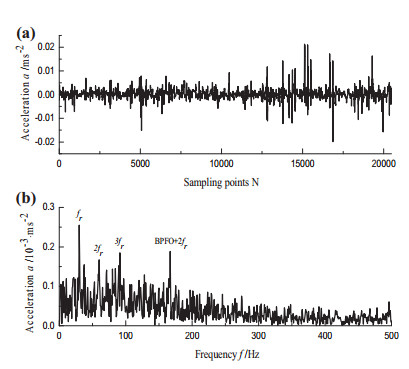
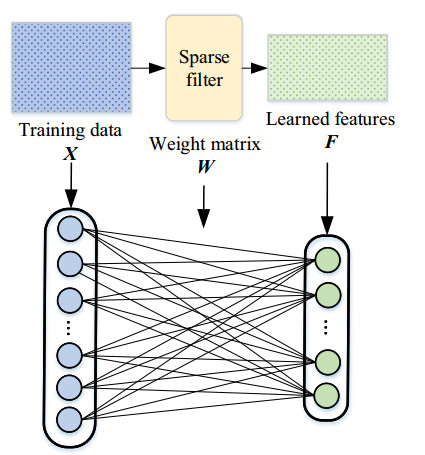
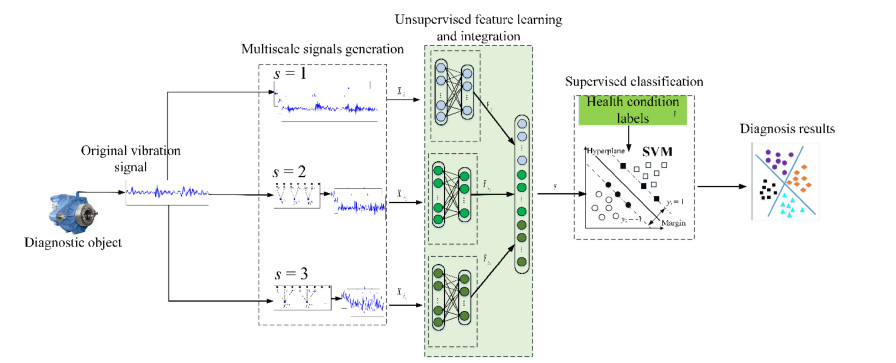
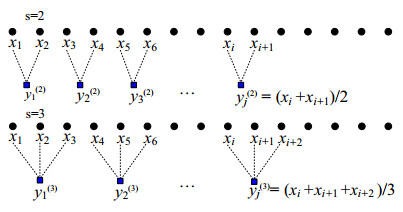
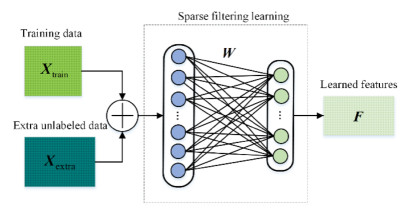
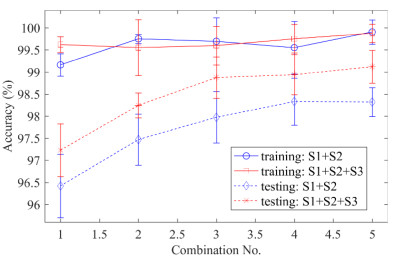
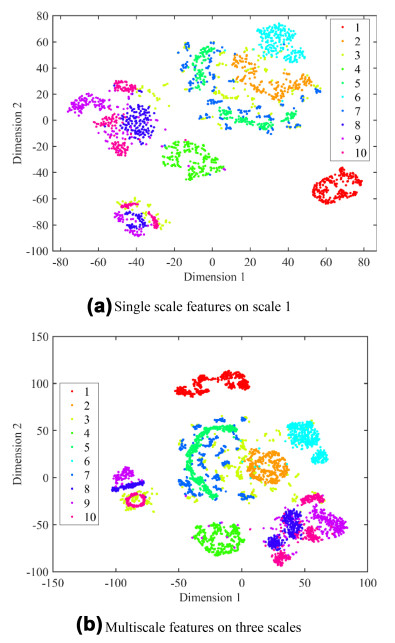
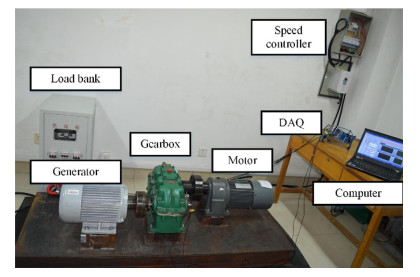
The performance of traditional vibration based fault diagnosis methods greatly depends on those handcrafted features extracted using signal processing algorithms, which require significant amounts of domain knowledge and human labor, and do not generalize well to new diagnosis domains. Recently, unsupervised representation learning provides an alternative promising solution to feature extraction in traditional fault diagnosis due to its superior learning ability from unlabeled data. Given that vibration signals usually contain multiple temporal structures, this paper proposes a multiscale representation learning (MSRL) framework to learn useful features directly from raw vibration signals, with the aim to capture rich and complementary fault pattern information at different scales. In our proposed approach, a coarse-grained procedure is first employed to obtain multiple scale signals from an original vibration signal. Then, sparse filtering, a newly developed unsupervised learning algorithm, is applied to automatically learn useful features from each scale signal, respectively, and then the learned features at each scale to be concatenated one by one to obtain multiscale representations. Finally, the multiscale representations are fed into a supervised classifier to achieve diagnosis results. Our proposed approach is evaluated using two different case studies:motor bearing and wind turbine gearbox fault diagnosis. Experimental results show that the proposed MSRL approach can take full advantages of the availability of unlabeled data to learn discriminative features and achieved better performance with higher accuracy and stability compared to the traditional approaches.
The performance of traditional vibration based fault diagnosis methods greatly depends on those handcrafted features extracted using signal processing algorithms, which require significant amounts of domain knowledge and human labor, and do not generalize well to new diagnosis domains. Recently, unsupervised representation learning provides an alternative promising solution to feature extraction in traditional fault diagnosis due to its superior learning ability from unlabeled data. Given that vibration signals usually contain multiple temporal structures, this paper proposes a multiscale representation learning (MSRL) framework to learn useful features directly from raw vibration signals, with the aim to capture rich and complementary fault pattern information at different scales. In our proposed approach, a coarse-grained procedure is first employed to obtain multiple scale signals from an original vibration signal. Then, sparse filtering, a newly developed unsupervised learning algorithm, is applied to automatically learn useful features from each scale signal, respectively, and then the learned features at each scale to be concatenated one by one to obtain multiscale representations. Finally, the multiscale representations are fed into a supervised classifier to achieve diagnosis results. Our proposed approach is evaluated using two different case studies:motor bearing and wind turbine gearbox fault diagnosis. Experimental results show that the proposed MSRL approach can take full advantages of the availability of unlabeled data to learn discriminative features and achieved better performance with higher accuracy and stability compared to the traditional approaches.
2017, 30(6): 1325-1337.
doi: 10.1007/s10033-017-0187-0
Abstract:
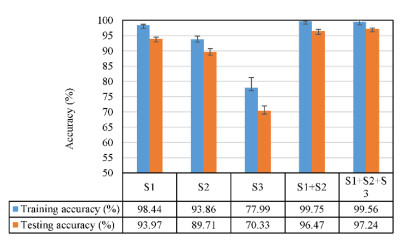
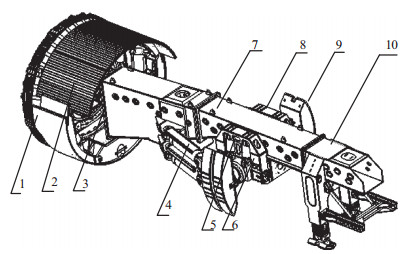
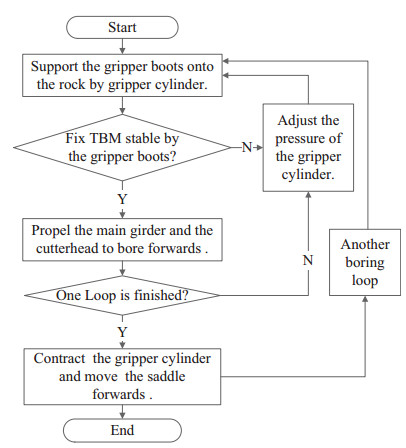
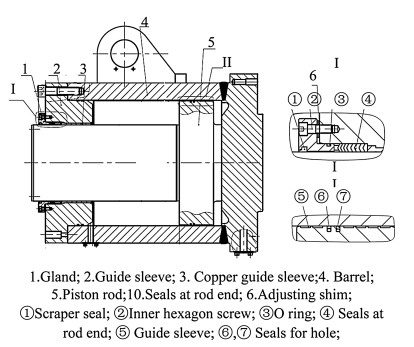
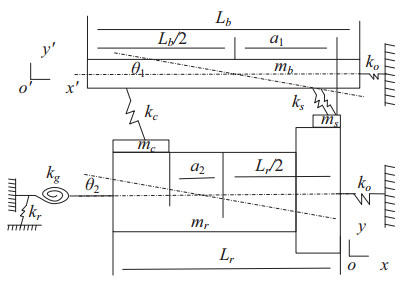
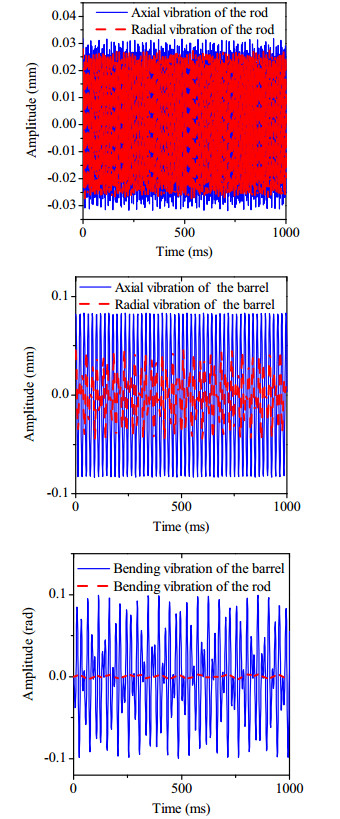
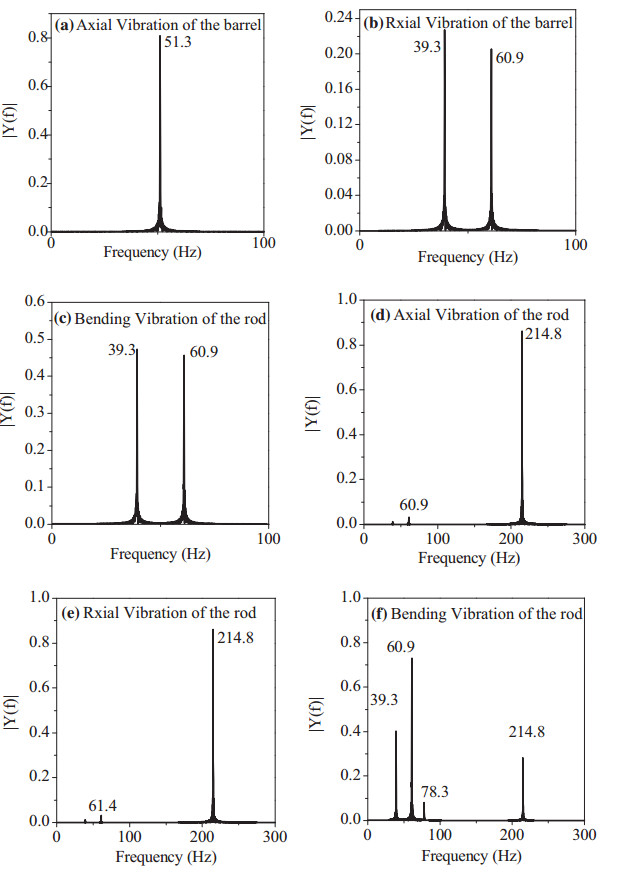
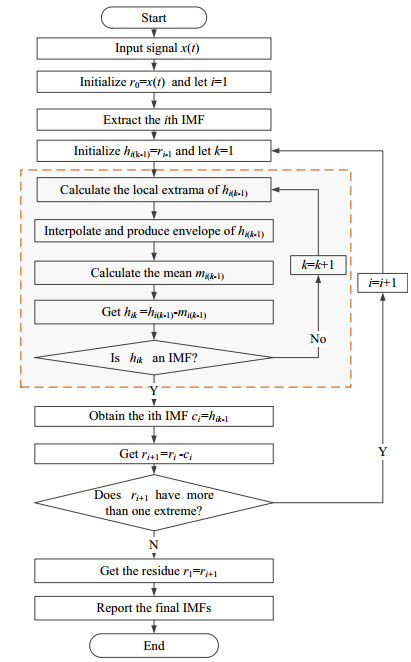
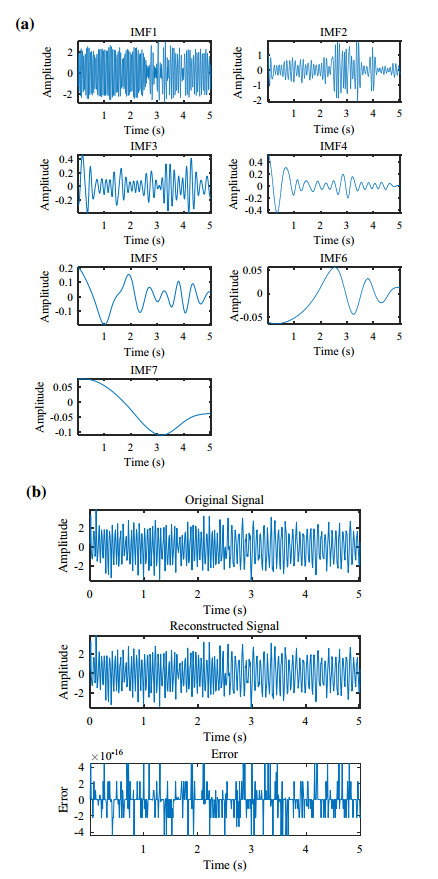
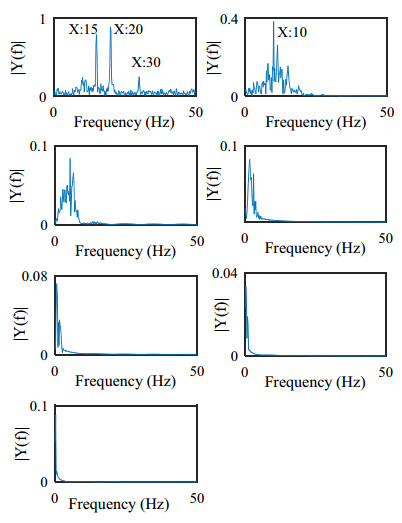
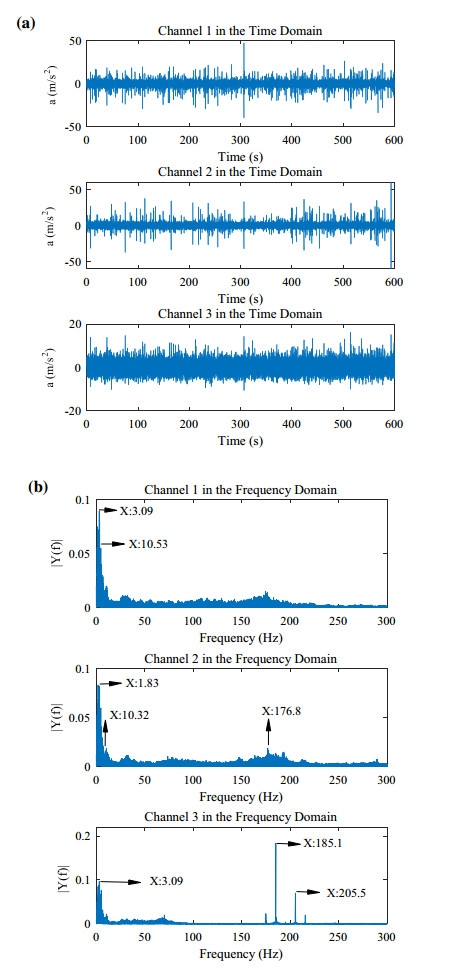
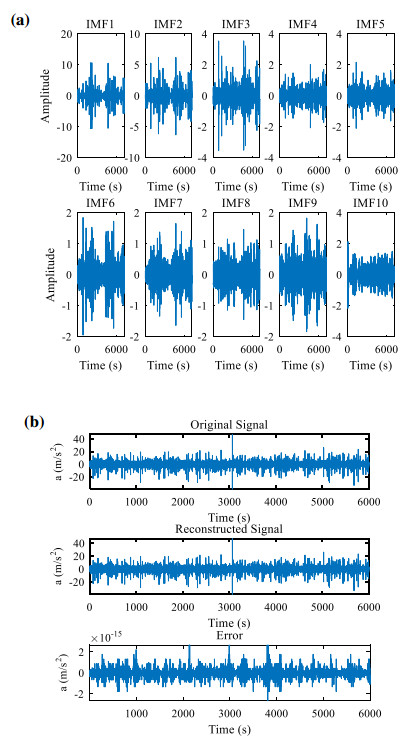
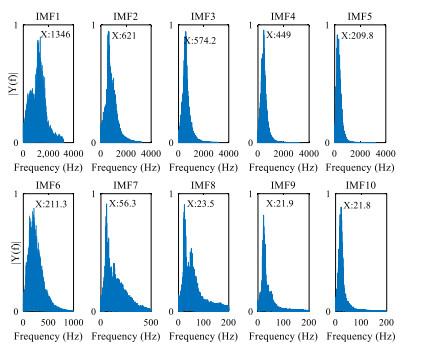
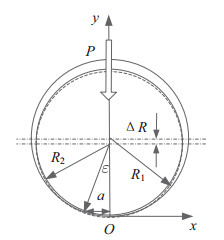
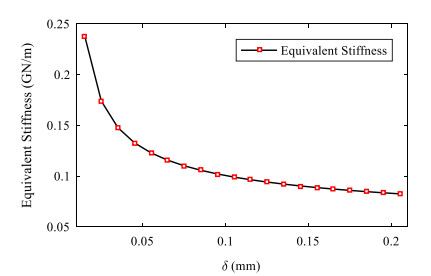
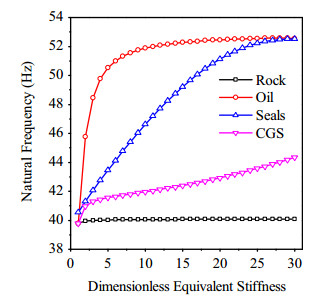
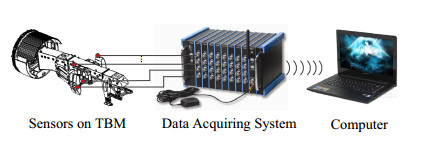
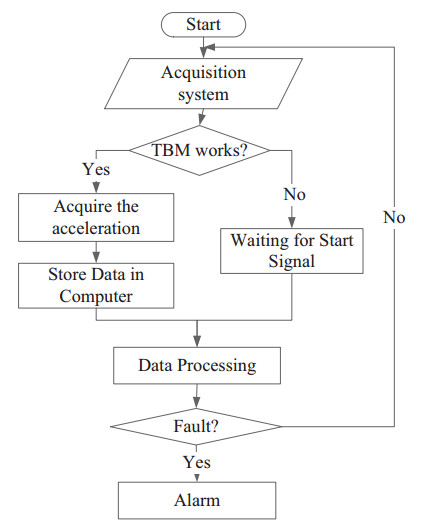
The gripper cylinder that provides braced force for Tunnel Boring Machine (TBM) might fail due to severe vibration when the TBM excavates in the tunnel. Early fault diagnosis of the gripper cylinder is important for the safety and efficiency of the whole tunneling project. In this paper, an online condition monitoring system based on the Empirical Mode Decomposition (EMD) method is established for fault diagnosis of the gripper cylinder while TBM is working. Firstly, the lumped mass parameter model of the gripper cylinder is established considering the influence of the variable stiffness at the rock interface, the equivalent stiffness of the oil, the seals, and the copper guide sleeve. The dynamic performance of the gripper cylinder is investigated to provide basis for its health condition evaluation. Then, the EMD method is applied to identify the characteristic frequencies of the gripper cylinder for fault diagnosis and a field test is used to verify the accuracy of the EMD method for detection of the characteristic frequencies. Furthermore, the contact stiffness at the interface between the barrel and the rod is calculated with Hertz theory and the relationship between the natural frequency and the stiffness varying with the health condition of the cylinder is simulated based on the dynamic model. The simulation shows that the characteristic frequencies decrease with the increasing clearance between the barrel and the rod, thus the defects could be indicated by monitoring the natural frequency. Finally, a health condition management system of the gripper cylinder based on the vibration signal and the EMD method is established, which could ensure the safety of TBM.
The gripper cylinder that provides braced force for Tunnel Boring Machine (TBM) might fail due to severe vibration when the TBM excavates in the tunnel. Early fault diagnosis of the gripper cylinder is important for the safety and efficiency of the whole tunneling project. In this paper, an online condition monitoring system based on the Empirical Mode Decomposition (EMD) method is established for fault diagnosis of the gripper cylinder while TBM is working. Firstly, the lumped mass parameter model of the gripper cylinder is established considering the influence of the variable stiffness at the rock interface, the equivalent stiffness of the oil, the seals, and the copper guide sleeve. The dynamic performance of the gripper cylinder is investigated to provide basis for its health condition evaluation. Then, the EMD method is applied to identify the characteristic frequencies of the gripper cylinder for fault diagnosis and a field test is used to verify the accuracy of the EMD method for detection of the characteristic frequencies. Furthermore, the contact stiffness at the interface between the barrel and the rod is calculated with Hertz theory and the relationship between the natural frequency and the stiffness varying with the health condition of the cylinder is simulated based on the dynamic model. The simulation shows that the characteristic frequencies decrease with the increasing clearance between the barrel and the rod, thus the defects could be indicated by monitoring the natural frequency. Finally, a health condition management system of the gripper cylinder based on the vibration signal and the EMD method is established, which could ensure the safety of TBM.
2017, 30(6): 1338-1346.
doi: 10.1007/s10033-017-0191-4
Abstract:
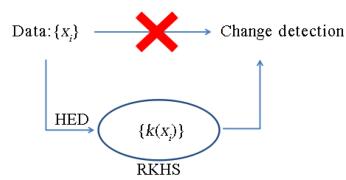
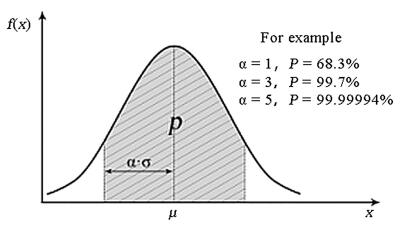
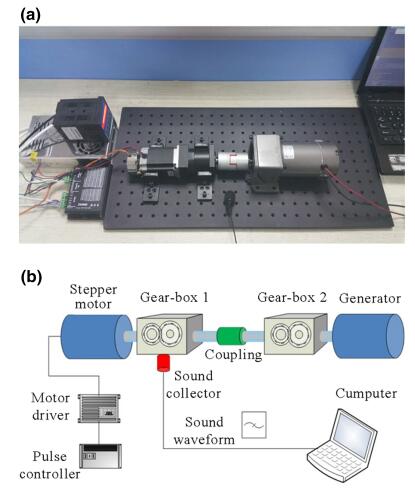
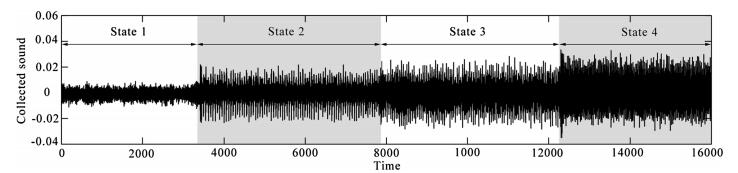
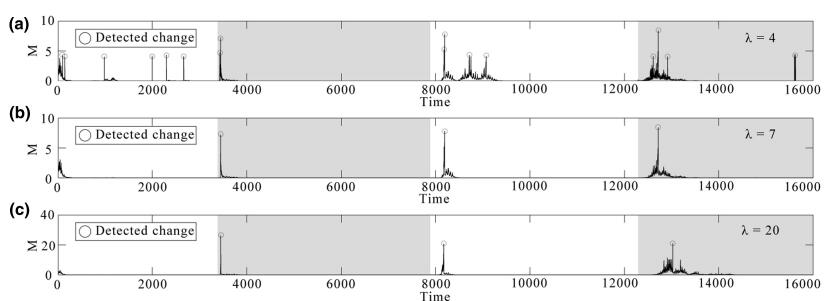
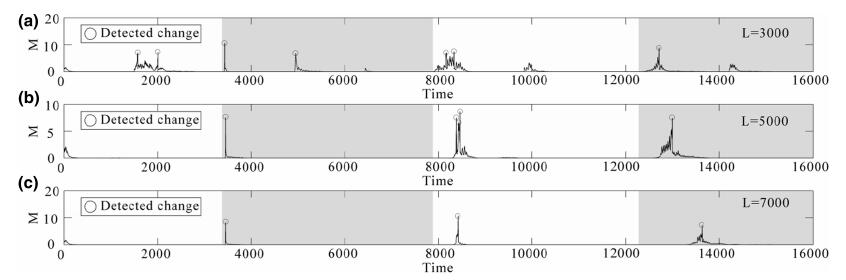
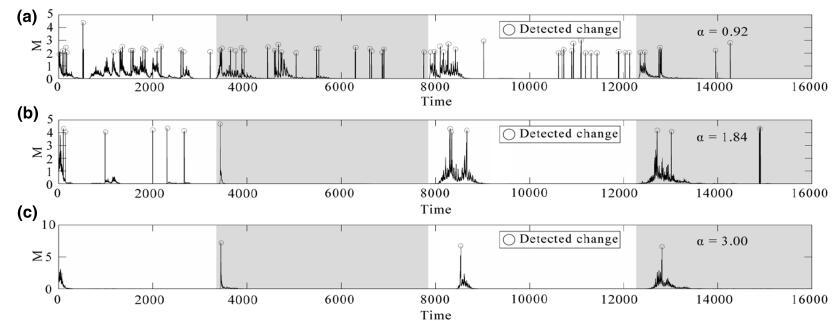
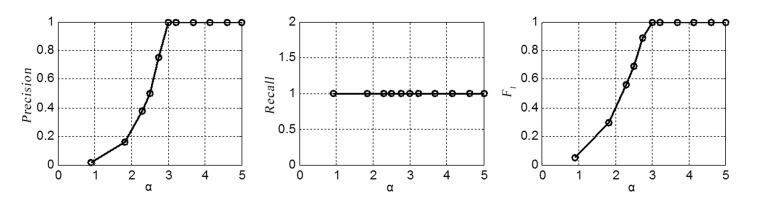
Detection of structural changes from an operational process is a major goal in machine condition monitoring. Existing methods for this purpose are mainly based on retrospective analysis, resulting in a large detection delay that limits their usages in real applications. This paper presents a new adaptive real-time change detection algorithm, an extension of the recent research by combining with an incremental sliding-window strategy, to handle the multi-change detection in long-term monitoring of machine operations. In particular, in the framework, Hilbert space embedding of distribution is used to map the original data into the Re-producing Kernel Hilbert Space (RKHS) for change detection; then, a new adaptive threshold strategy can be developed when making change decision, in which a global factor (used to control the coarse-to-fine level of detection) is introduced to replace the fixed value of threshold. Through experiments on a range of real testing data which was collected from an experimental rotating machinery system, the excellent detection performances of the algorithm for engineering applications were demonstrated. Compared with state-ofthe-art methods, the proposed algorithm can be more suitable for long-term machinery condition monitoring without any manual re-calibration, thus is promising in modern industries.
Detection of structural changes from an operational process is a major goal in machine condition monitoring. Existing methods for this purpose are mainly based on retrospective analysis, resulting in a large detection delay that limits their usages in real applications. This paper presents a new adaptive real-time change detection algorithm, an extension of the recent research by combining with an incremental sliding-window strategy, to handle the multi-change detection in long-term monitoring of machine operations. In particular, in the framework, Hilbert space embedding of distribution is used to map the original data into the Re-producing Kernel Hilbert Space (RKHS) for change detection; then, a new adaptive threshold strategy can be developed when making change decision, in which a global factor (used to control the coarse-to-fine level of detection) is introduced to replace the fixed value of threshold. Through experiments on a range of real testing data which was collected from an experimental rotating machinery system, the excellent detection performances of the algorithm for engineering applications were demonstrated. Compared with state-ofthe-art methods, the proposed algorithm can be more suitable for long-term machinery condition monitoring without any manual re-calibration, thus is promising in modern industries.
2017, 30(6): 1347-1356.
doi: 10.1007/s10033-017-0189-y
Abstract:
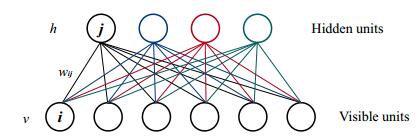
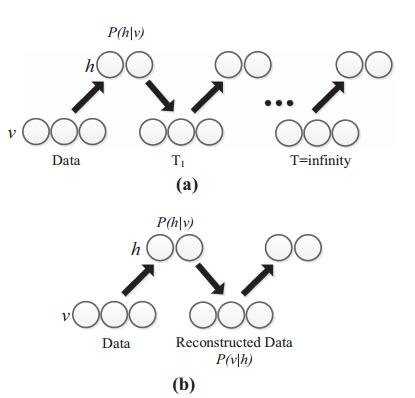
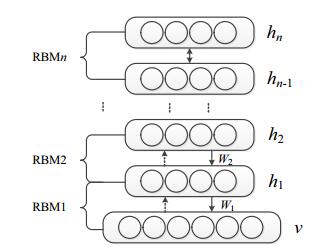
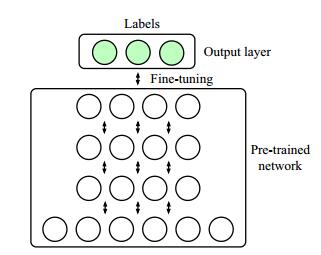
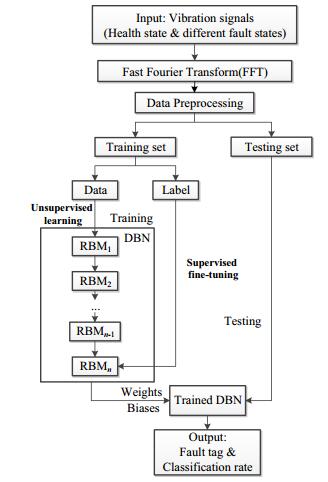
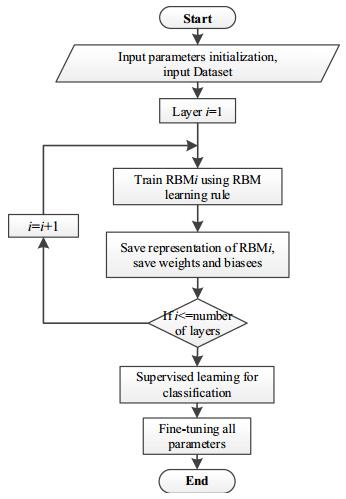
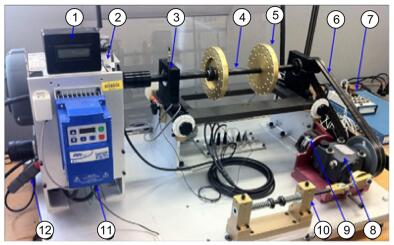
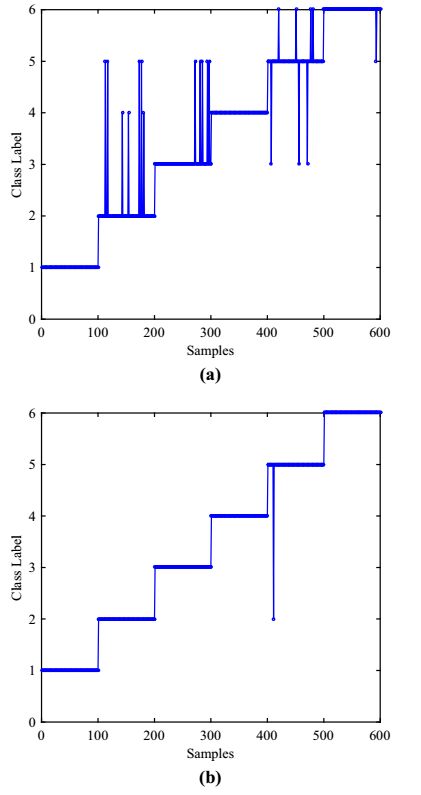
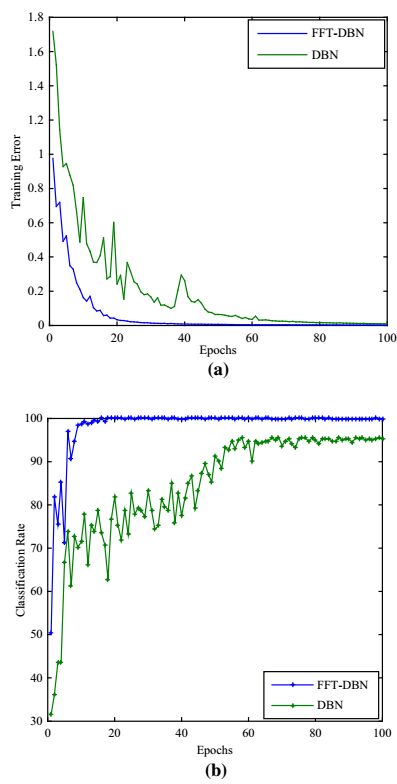
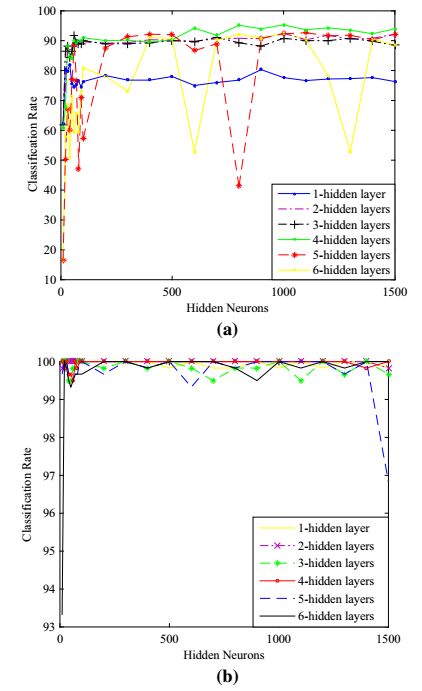
Extracting features from original signals is a key procedure for traditional fault diagnosis of induction motors, as it directly influences the performance of fault recognition. However, high quality features need expert knowledge and human intervention. In this paper, a deep learning approach based on deep belief networks (DBN) is developed to learn features from frequency distribution of vibration signals with the purpose of characterizing working status of induction motors. It combines feature extraction procedure with classification task together to achieve automated and intelligent fault diagnosis. The DBN model is built by stacking multiple-units of restricted Boltzmann machine (RBM), and is trained using layer-bylayer pre-training algorithm. Compared with traditional diagnostic approaches where feature extraction is needed, the presented approach has the ability of learning hierarchical representations, which are suitable for fault classification, directly from frequency distribution of the measurement data. The structure of the DBN model is investigated as the scale and depth of the DBN architecture directly affect its classification performance. Experimental study conducted on a machine fault simulator verifies the effectiveness of the deep learning approach for fault diagnosis of induction motors. This research proposes an intelligent diagnosis method for induction motor which utilizes deep learning model to automatically learn features from sensor data and realize working status recognition.
Extracting features from original signals is a key procedure for traditional fault diagnosis of induction motors, as it directly influences the performance of fault recognition. However, high quality features need expert knowledge and human intervention. In this paper, a deep learning approach based on deep belief networks (DBN) is developed to learn features from frequency distribution of vibration signals with the purpose of characterizing working status of induction motors. It combines feature extraction procedure with classification task together to achieve automated and intelligent fault diagnosis. The DBN model is built by stacking multiple-units of restricted Boltzmann machine (RBM), and is trained using layer-bylayer pre-training algorithm. Compared with traditional diagnostic approaches where feature extraction is needed, the presented approach has the ability of learning hierarchical representations, which are suitable for fault classification, directly from frequency distribution of the measurement data. The structure of the DBN model is investigated as the scale and depth of the DBN architecture directly affect its classification performance. Experimental study conducted on a machine fault simulator verifies the effectiveness of the deep learning approach for fault diagnosis of induction motors. This research proposes an intelligent diagnosis method for induction motor which utilizes deep learning model to automatically learn features from sensor data and realize working status recognition.
2017, 30(6): 1357-1368.
doi: 10.1007/s10033-017-0190-5
Abstract:
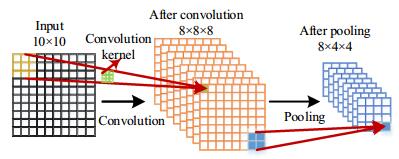
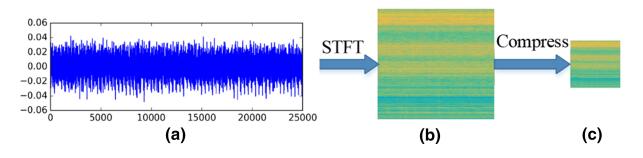
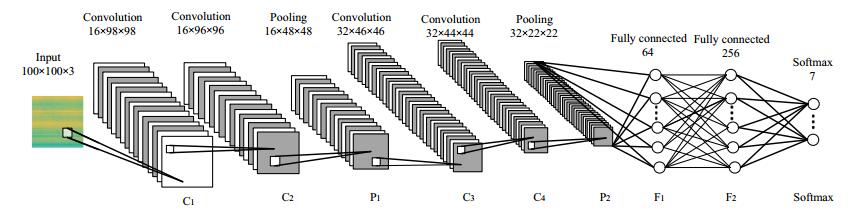
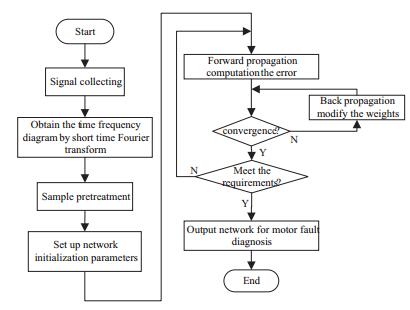
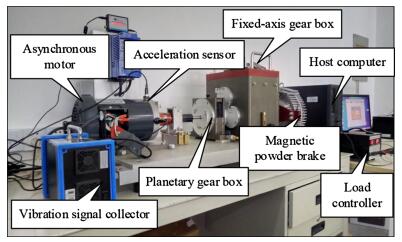
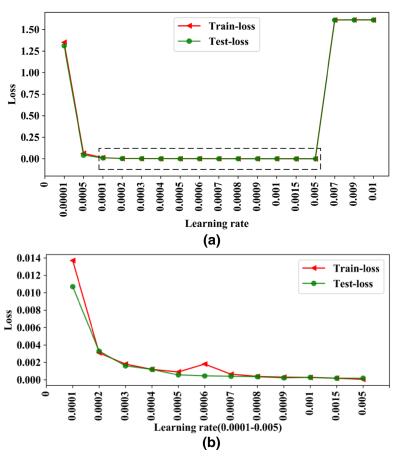
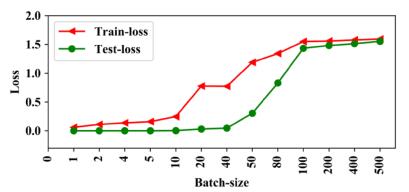
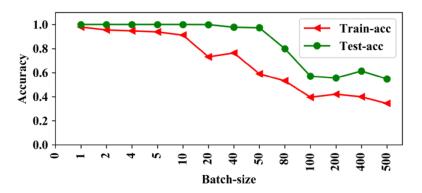
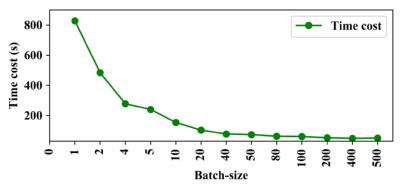
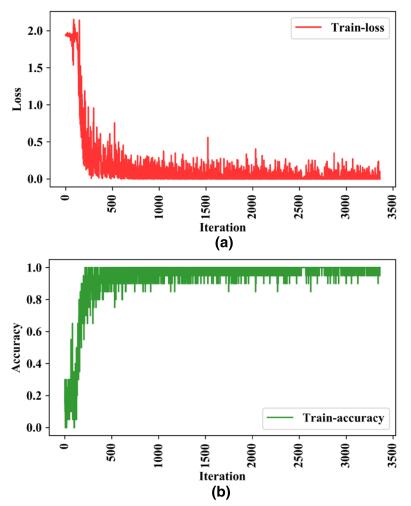
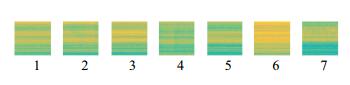
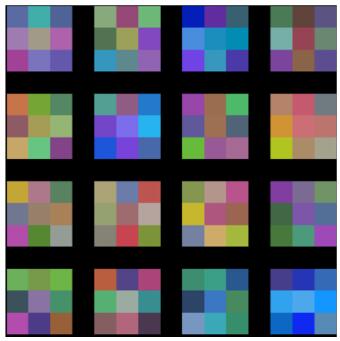
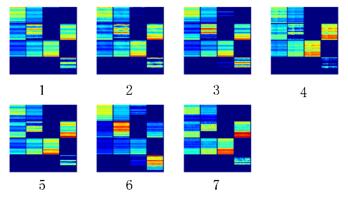
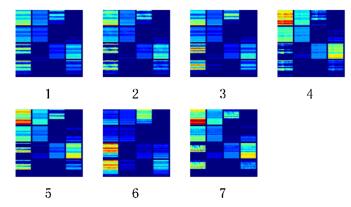
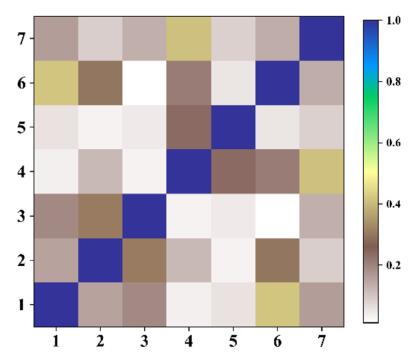
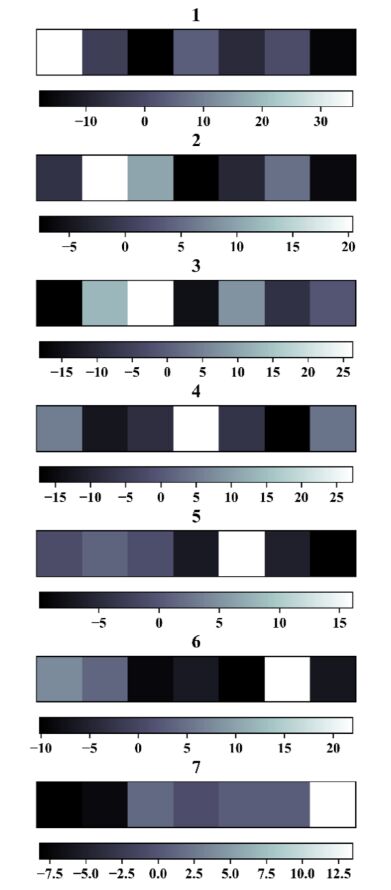
With the rapid development of mechanical equipment, the mechanical health monitoring field has entered the era of big data. However, the method of manual feature extraction has the disadvantages of low efficiency and poor accuracy, when handling big data. In this study, the research object was the asynchronous motor in the drivetrain diagnostics simulator system. The vibration signals of different fault motors were collected. The raw signal was pretreated using short time Fourier transform (STFT) to obtain the corresponding time-frequency map. Then, the feature of the time-frequency map was adaptively extracted by using a convolutional neural network (CNN). The effects of the pretreatment method, and the hyper parameters of network diagnostic accuracy, were investigated experimentally. The experimental results showed that the influence of the preprocessing method is small, and that the batch-size is the main factor affecting accuracy and training efficiency. By investigating feature visualization, it was shown that, in the case of big data, the extracted CNN features can represent complex mapping relationships between signal and health status, and can also overcome the prior knowledge and engineering experience requirement for feature extraction, which is used by traditional diagnosis methods. This paper proposes a new method, based on STFT and CNN, which can complete motor fault diagnosis tasks more intelligently and accurately.
With the rapid development of mechanical equipment, the mechanical health monitoring field has entered the era of big data. However, the method of manual feature extraction has the disadvantages of low efficiency and poor accuracy, when handling big data. In this study, the research object was the asynchronous motor in the drivetrain diagnostics simulator system. The vibration signals of different fault motors were collected. The raw signal was pretreated using short time Fourier transform (STFT) to obtain the corresponding time-frequency map. Then, the feature of the time-frequency map was adaptively extracted by using a convolutional neural network (CNN). The effects of the pretreatment method, and the hyper parameters of network diagnostic accuracy, were investigated experimentally. The experimental results showed that the influence of the preprocessing method is small, and that the batch-size is the main factor affecting accuracy and training efficiency. By investigating feature visualization, it was shown that, in the case of big data, the extracted CNN features can represent complex mapping relationships between signal and health status, and can also overcome the prior knowledge and engineering experience requirement for feature extraction, which is used by traditional diagnosis methods. This paper proposes a new method, based on STFT and CNN, which can complete motor fault diagnosis tasks more intelligently and accurately.

2017, 30(6): 1369-1382.
doi: 10.1007/s10033-017-0196-z
Abstract:
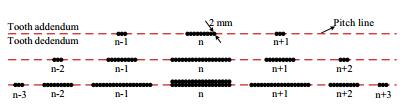
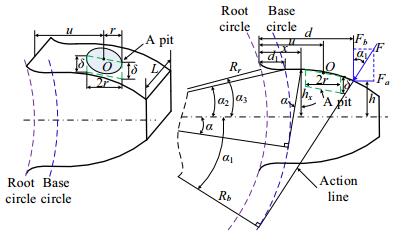
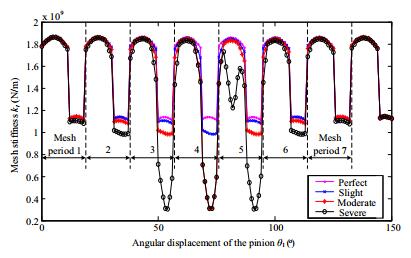
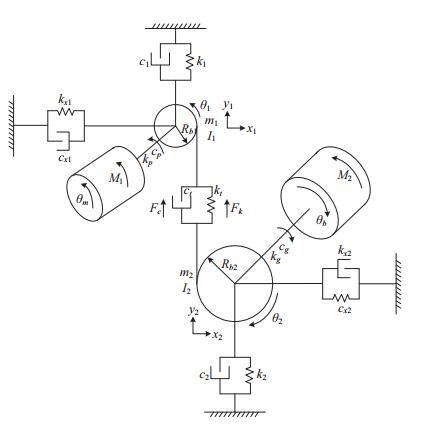
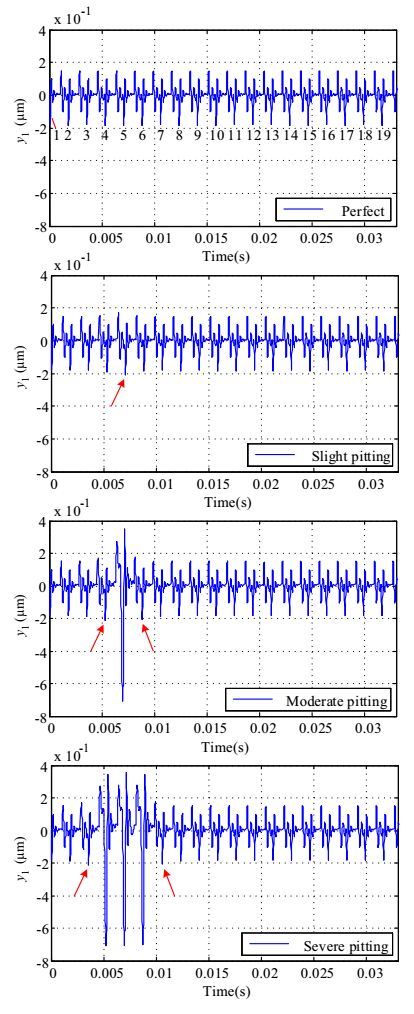
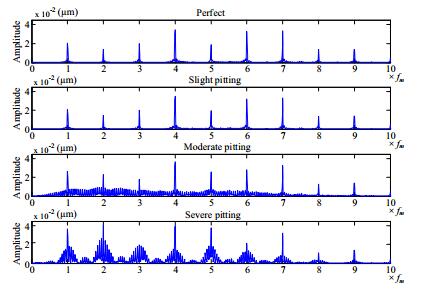
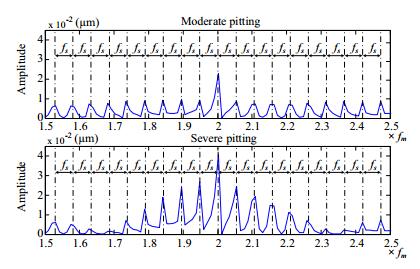
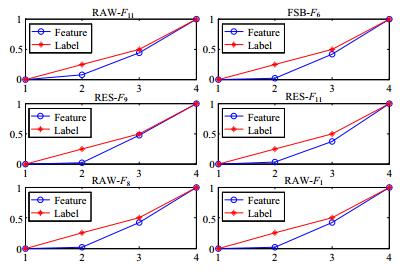
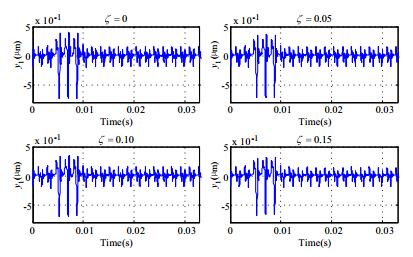
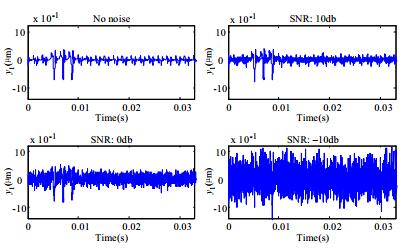
Tooth pitting is a common failure mode of a gearbox. Many researchers investigated dynamic properties of a gearbox with localized pitting damage on a single gear tooth. The dynamic properties of a gearbox with pitting distributed over multiple teeth have rarely been investigated. In this paper, gear tooth pitting propagation to neighboring teeth is modeled and investigated for a pair of spur gears. Tooth pitting propagation effect on time-varying mesh stiffness, gearbox dynamics and vibration characteristics is studied and then fault symptoms are revealed. In addition, the influence of gear mesh damping and environmental noise on gearbox vibration properties is investigated. In the end, 114 statistical features are tested to estimate tooth pitting growth. Statistical features that are insensitive to gear mesh damping and environmental noise are recommended.
Tooth pitting is a common failure mode of a gearbox. Many researchers investigated dynamic properties of a gearbox with localized pitting damage on a single gear tooth. The dynamic properties of a gearbox with pitting distributed over multiple teeth have rarely been investigated. In this paper, gear tooth pitting propagation to neighboring teeth is modeled and investigated for a pair of spur gears. Tooth pitting propagation effect on time-varying mesh stiffness, gearbox dynamics and vibration characteristics is studied and then fault symptoms are revealed. In addition, the influence of gear mesh damping and environmental noise on gearbox vibration properties is investigated. In the end, 114 statistical features are tested to estimate tooth pitting growth. Statistical features that are insensitive to gear mesh damping and environmental noise are recommended.

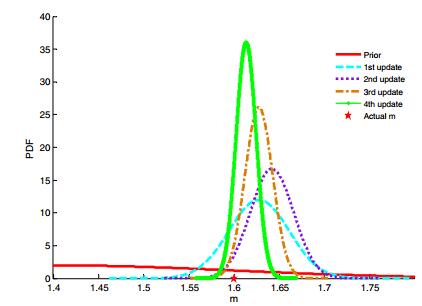
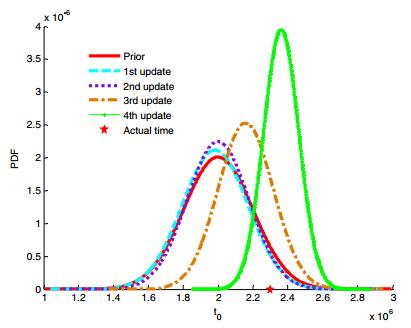
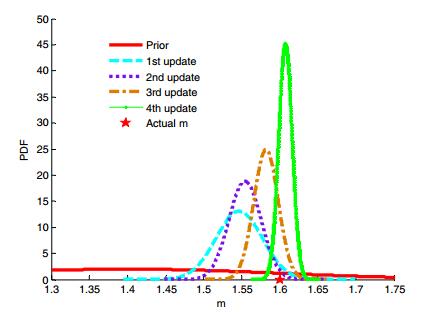
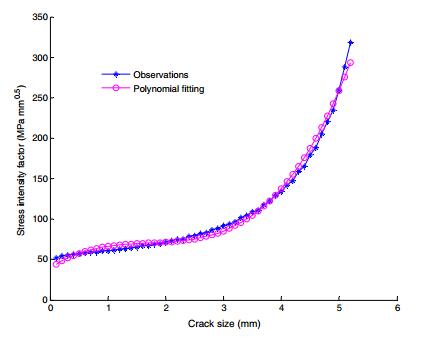
Integrated Equipment Health Prognosis Considering Crack Initiation Time Uncertainty and Random Shock
2017, 30(6): 1383-1395.
doi: 10.1007/s10033-017-0200-7
Abstract:
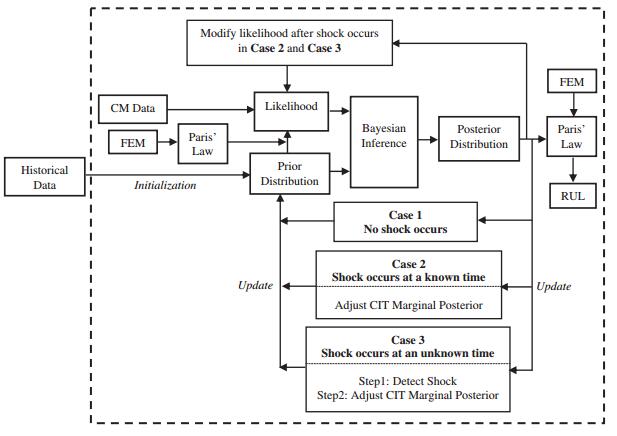
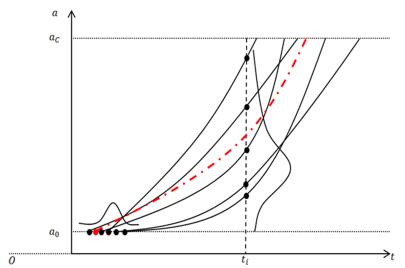
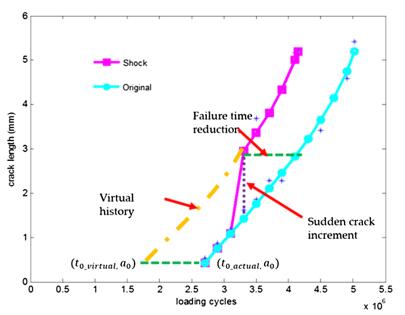
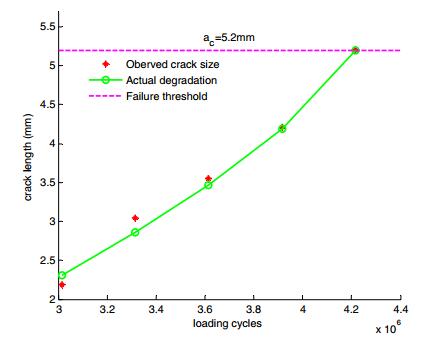
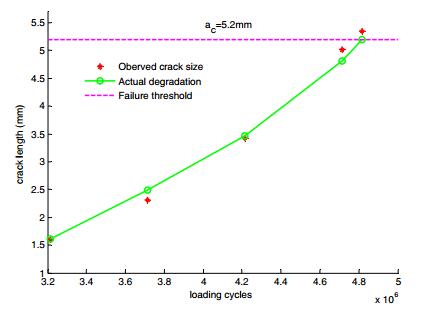
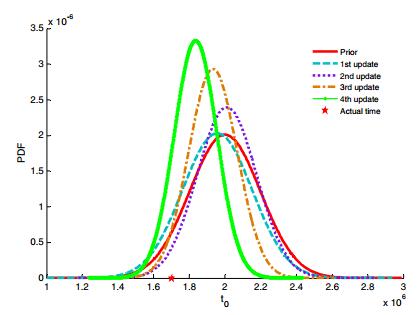
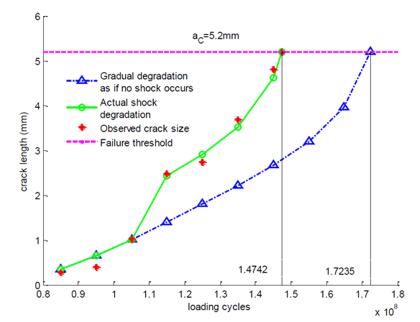
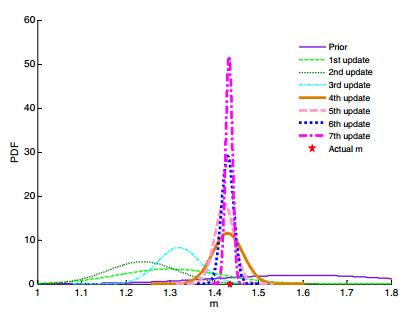
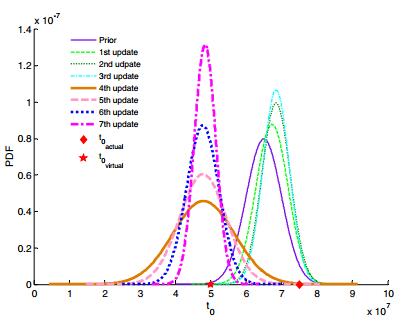
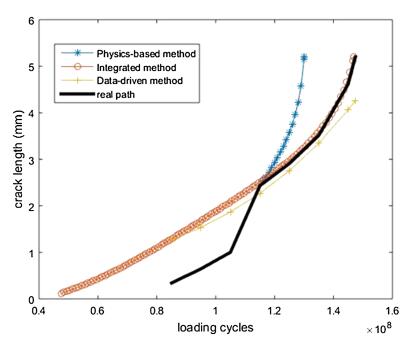
With integrated equipment health prognosis, both physical models and condition monitoring data are utilized to achieve more accurate prediction of equipment remaining useful life (RUL). In this paper, an integrated prognostics method is proposed to account for two important factors which were not considered before, the uncertainty in crack initiation time (CIT) and the shock in the degradation. Prognostics tools are used for RUL prediction starting from the CIT. However, there is uncertainty in CIT due to the limited capability of existing fault detection tools, and such uncertainty has not been explicitly considered in the literature for integrated prognosis. A shock causes a sudden damage increase and creates a jump in the degradation path, which shortens the total lifetime, and it has not been considered before in the integrated prognostics framework either. In the proposed integrated prognostics method, CIT is considered as an uncertain parameter, which is updated using condition monitoring data. To deal with the sudden damage increase and reduction of total lifetime, a virtual gradual degradation path with an earlier CIT is introduced in the proposed method. In this way, the effect of shock is captured through identifying an appropriate CIT. Examples of gear prognostics are given to demonstrate the effectiveness of the proposed method.
With integrated equipment health prognosis, both physical models and condition monitoring data are utilized to achieve more accurate prediction of equipment remaining useful life (RUL). In this paper, an integrated prognostics method is proposed to account for two important factors which were not considered before, the uncertainty in crack initiation time (CIT) and the shock in the degradation. Prognostics tools are used for RUL prediction starting from the CIT. However, there is uncertainty in CIT due to the limited capability of existing fault detection tools, and such uncertainty has not been explicitly considered in the literature for integrated prognosis. A shock causes a sudden damage increase and creates a jump in the degradation path, which shortens the total lifetime, and it has not been considered before in the integrated prognostics framework either. In the proposed integrated prognostics method, CIT is considered as an uncertain parameter, which is updated using condition monitoring data. To deal with the sudden damage increase and reduction of total lifetime, a virtual gradual degradation path with an earlier CIT is introduced in the proposed method. In this way, the effect of shock is captured through identifying an appropriate CIT. Examples of gear prognostics are given to demonstrate the effectiveness of the proposed method.

2017, 30(6): 1396-1405.
doi: 10.1007/s10033-017-0193-2
Abstract:
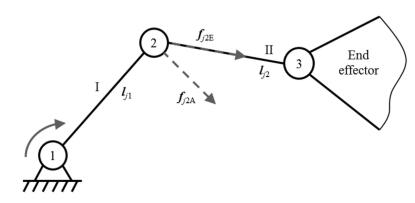
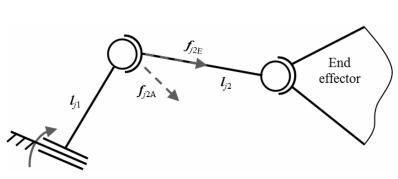
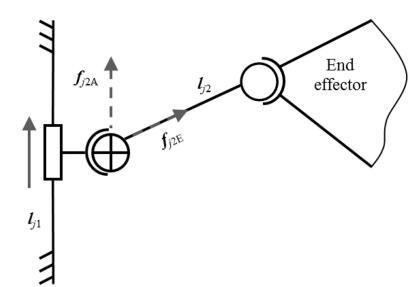
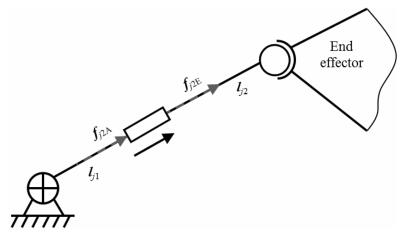
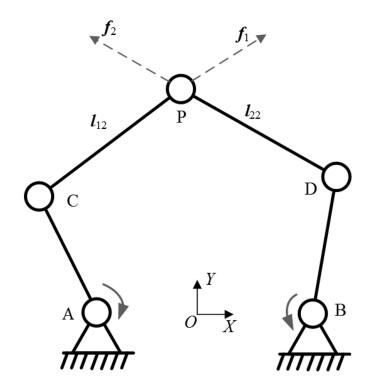
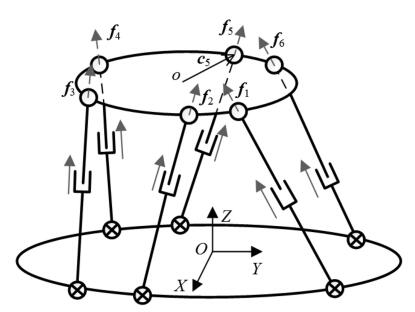
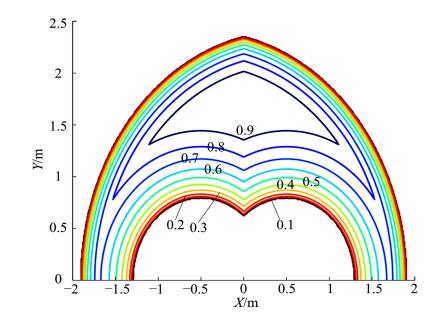
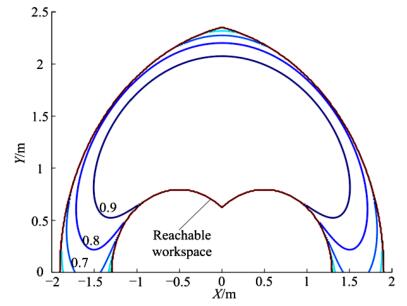
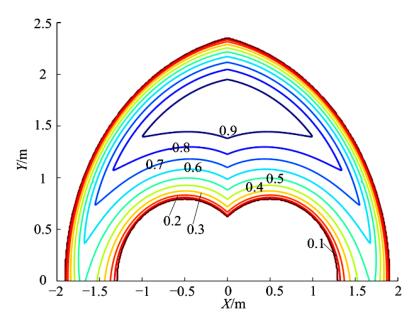
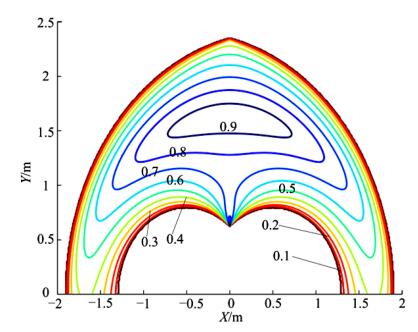
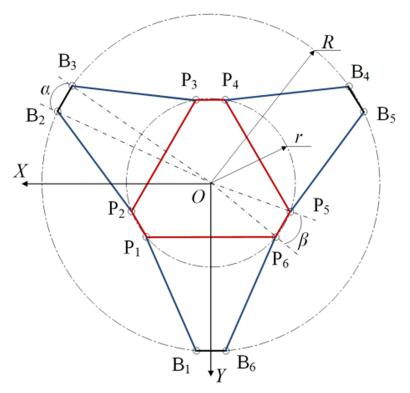
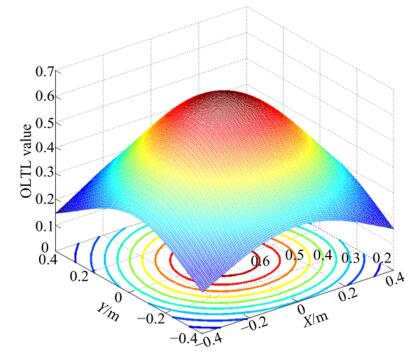
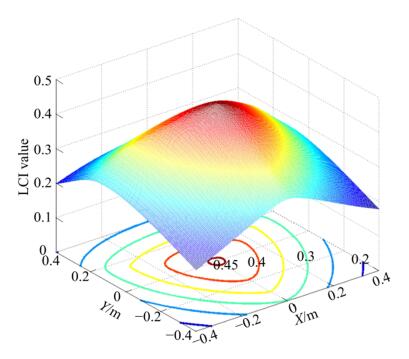
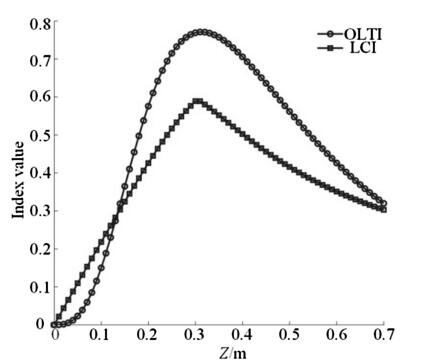
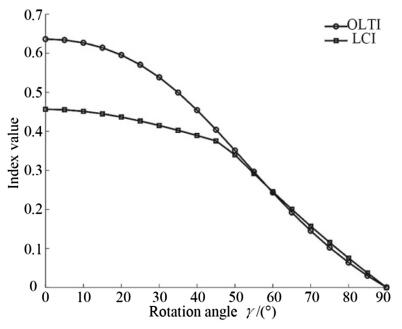
Performance index is the standard of performance evaluation, and is the foundation of both performance analysis and optimal design for the parallel manipulator. Seeking the suitable kinematic indices is always an important and challenging issue for the parallel manipulator. So far, there are extensive studies in this field, but few existing indices can meet all the requirements, such as simple, intuitive, and universal. To solve this problem, the matrix orthogonal degree is adopted, and generalized transmission indices that can evaluate motion/force transmissibility of fully parallel manipulators are proposed. Transmission performance analysis of typical branches, end effectors, and parallel manipulators is given to illustrate proposed indices and analysis methodology. Simulation and analysis results reveal that proposed transmission indices possess significant advantages, such as normalized finite (ranging from 0 to 1), dimensionally homogeneous, frame-free, intuitive and easy to calculate. Besides, proposed indices well indicate the good transmission region and relativity to the singularity with better resolution than the traditional local conditioning index, and provide a novel tool for kinematic analysis and optimal design of fully parallel manipulators.
Performance index is the standard of performance evaluation, and is the foundation of both performance analysis and optimal design for the parallel manipulator. Seeking the suitable kinematic indices is always an important and challenging issue for the parallel manipulator. So far, there are extensive studies in this field, but few existing indices can meet all the requirements, such as simple, intuitive, and universal. To solve this problem, the matrix orthogonal degree is adopted, and generalized transmission indices that can evaluate motion/force transmissibility of fully parallel manipulators are proposed. Transmission performance analysis of typical branches, end effectors, and parallel manipulators is given to illustrate proposed indices and analysis methodology. Simulation and analysis results reveal that proposed transmission indices possess significant advantages, such as normalized finite (ranging from 0 to 1), dimensionally homogeneous, frame-free, intuitive and easy to calculate. Besides, proposed indices well indicate the good transmission region and relativity to the singularity with better resolution than the traditional local conditioning index, and provide a novel tool for kinematic analysis and optimal design of fully parallel manipulators.
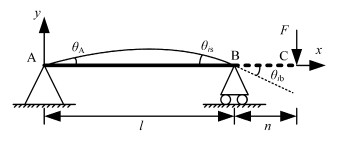
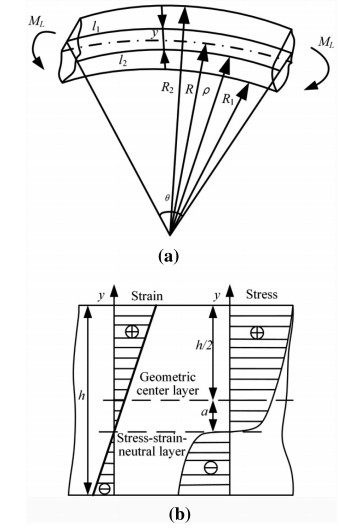
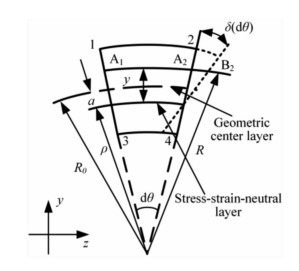
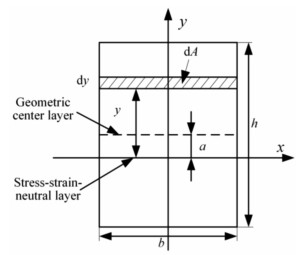
Springback Mechanism Analysis and Experiments on Robotic Bending of Rectangular Orthodontic Archwire
2017, 30(6): 1406-1415.
doi: 10.1007/s10033-017-0142-0
Abstract:
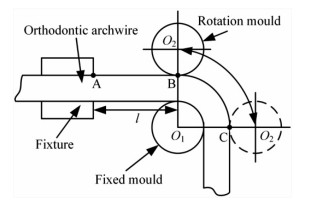
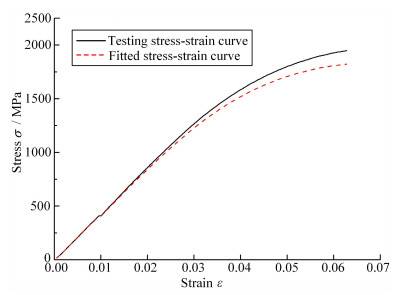
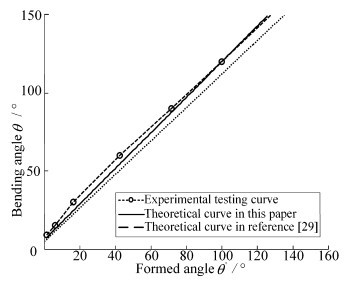
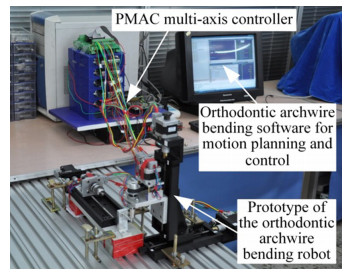
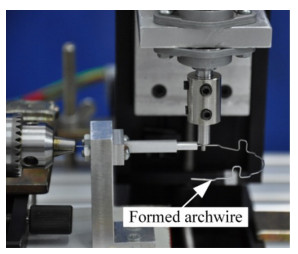
Fixed-appliance technology is the most common and effective malocclusion orthodontic treatment method, and its key step is the bending of orthodontic archwire. The springback of archwire did not consider the movement of the stress-strain-neutral layer. To solve this problem, a springback calculation model for rectangular orthodontic archwire is proposed. A bending springback experiment is conducted using an orthodontic archwire bending springback measurement device. The springback experimental results show that the theoretical calculation results using the proposed model coincide better with the experimental testing results than when movement of the stress-strain-neutral layer was not considered. A bending experiment with rectangular orthodontic archwire is conducted using a robotic orthodontic archwire bending system. The patient expriment result show that the maximum and minimum error ratios of formed orthodontic archwire parameters are 22.46% and 10.23% without considering springback and are decreased to 11.35% and 6.13% using the proposed model. The proposed springback calculation model, which considers the movement of the stress-strain-neutral layer, greatly improves the orthodontic archwire bending precision.
Fixed-appliance technology is the most common and effective malocclusion orthodontic treatment method, and its key step is the bending of orthodontic archwire. The springback of archwire did not consider the movement of the stress-strain-neutral layer. To solve this problem, a springback calculation model for rectangular orthodontic archwire is proposed. A bending springback experiment is conducted using an orthodontic archwire bending springback measurement device. The springback experimental results show that the theoretical calculation results using the proposed model coincide better with the experimental testing results than when movement of the stress-strain-neutral layer was not considered. A bending experiment with rectangular orthodontic archwire is conducted using a robotic orthodontic archwire bending system. The patient expriment result show that the maximum and minimum error ratios of formed orthodontic archwire parameters are 22.46% and 10.23% without considering springback and are decreased to 11.35% and 6.13% using the proposed model. The proposed springback calculation model, which considers the movement of the stress-strain-neutral layer, greatly improves the orthodontic archwire bending precision.


2017, 30(6): 1416-1425.
doi: 10.1007/s10033-017-0141-1
Abstract:
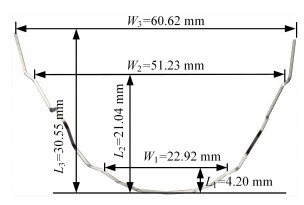
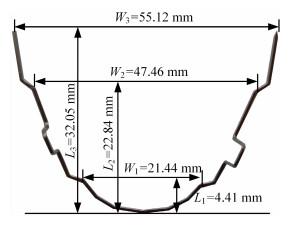
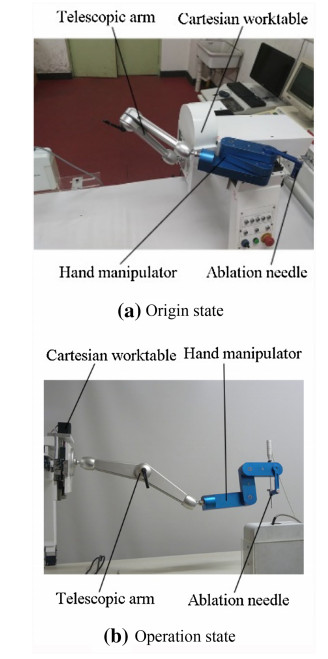
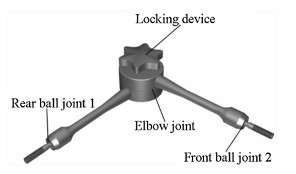
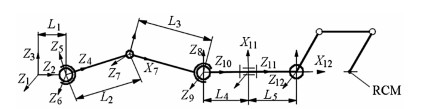
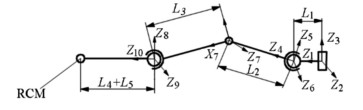
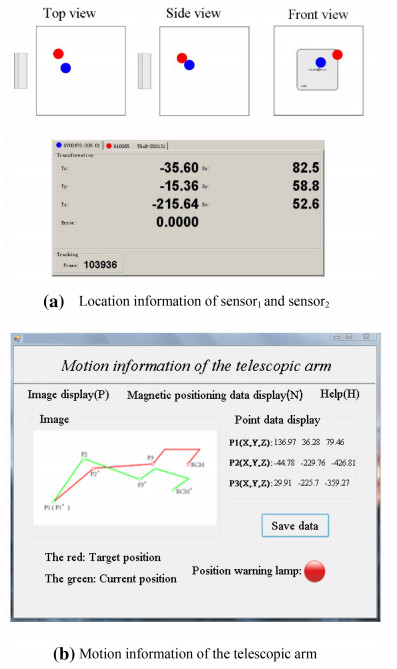
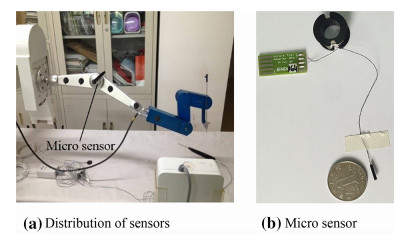
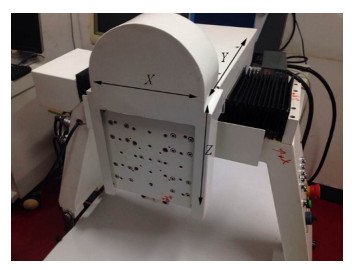
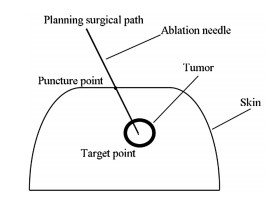
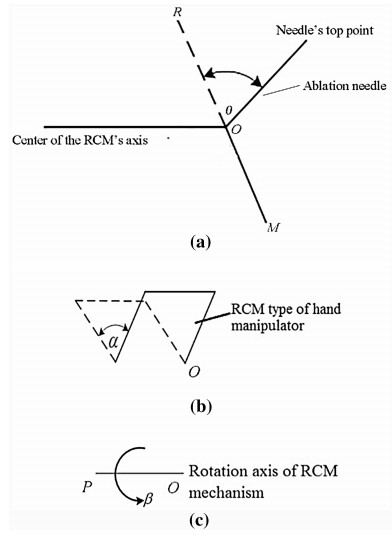
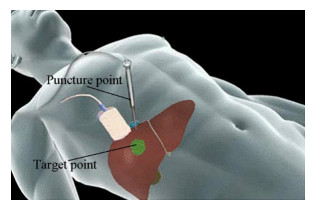
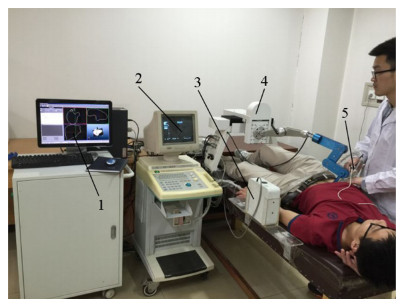
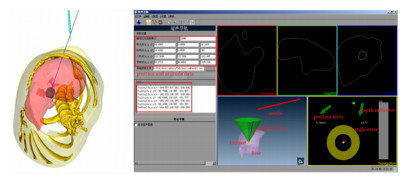
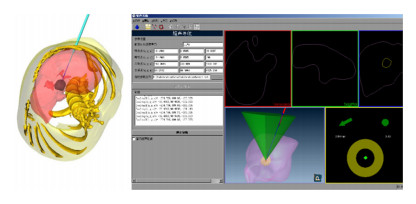
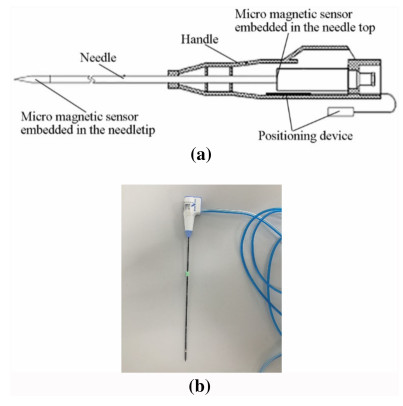
The existing interventional therapy robots for the microwave ablation of liver tumors have a poor clinical applicability with a large volume, low positioning speed and complex automatic navigation control. To solve above problems, a composite configuration interventional therapy robot with passive and active joints is developed. The design of composite configuration reduces the size of the robot under the premise of a wide range of movement, and the robot with composite configuration can realizes rapid positioning with operation safety. The cumulative error of positioning is eliminated and the control complexity is reduced by decoupling active parts. The navigation algorithms for the robot are proposed based on solution of the inverse kinematics and geometric analysis. A simulation clinical test method is designed for the robot, and the functions of the robot and the navigation algorithms are verified by the test method. The mean error of navigation is 1.488 mm and the maximum error is 2.056 mm, and the positioning time for the ablation needle is in 10 s. The experimental results show that the designed robot can meet the clinical requirements for the microwave ablation of liver tumors. The composite configuration is proposed in development of the interventional therapy robot for the microwave ablation of liver tumors, which provides a new idea for the structural design of medical robots.
The existing interventional therapy robots for the microwave ablation of liver tumors have a poor clinical applicability with a large volume, low positioning speed and complex automatic navigation control. To solve above problems, a composite configuration interventional therapy robot with passive and active joints is developed. The design of composite configuration reduces the size of the robot under the premise of a wide range of movement, and the robot with composite configuration can realizes rapid positioning with operation safety. The cumulative error of positioning is eliminated and the control complexity is reduced by decoupling active parts. The navigation algorithms for the robot are proposed based on solution of the inverse kinematics and geometric analysis. A simulation clinical test method is designed for the robot, and the functions of the robot and the navigation algorithms are verified by the test method. The mean error of navigation is 1.488 mm and the maximum error is 2.056 mm, and the positioning time for the ablation needle is in 10 s. The experimental results show that the designed robot can meet the clinical requirements for the microwave ablation of liver tumors. The composite configuration is proposed in development of the interventional therapy robot for the microwave ablation of liver tumors, which provides a new idea for the structural design of medical robots.

2017, 30(6): 1426-1437.
doi: 10.1007/s10033-017-0195-0
Abstract:
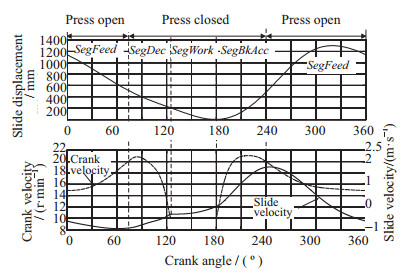
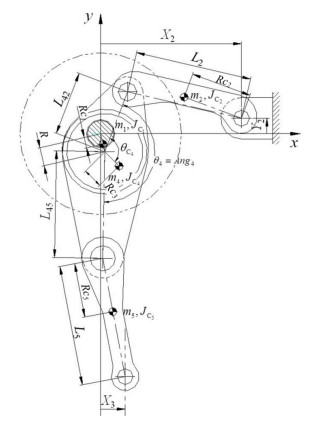
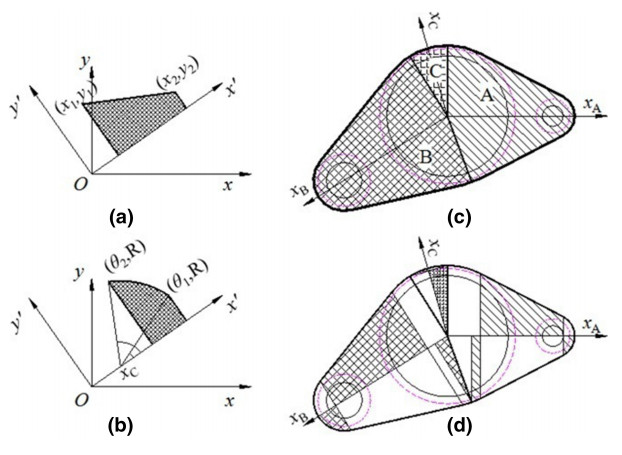
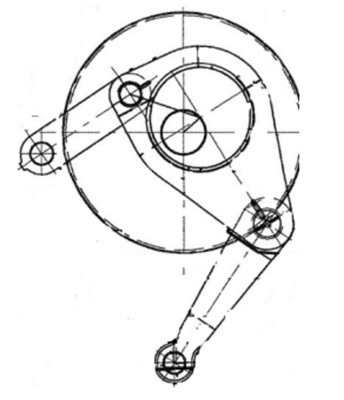
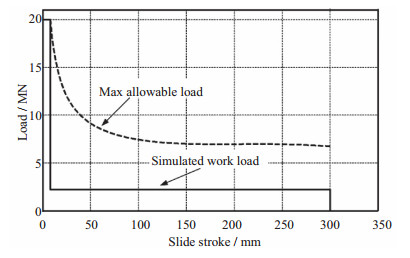
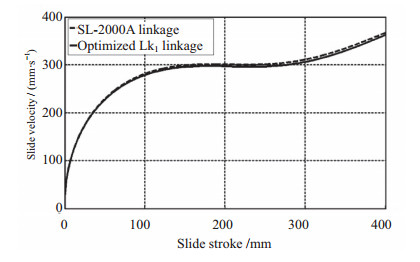
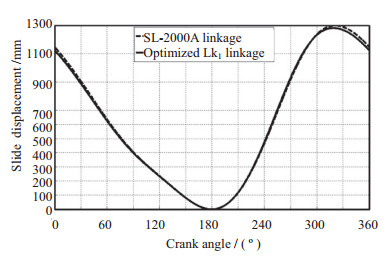
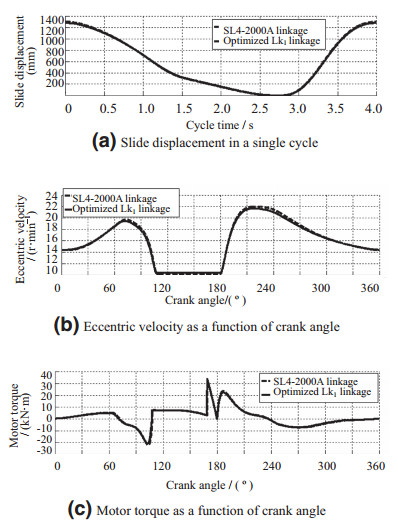
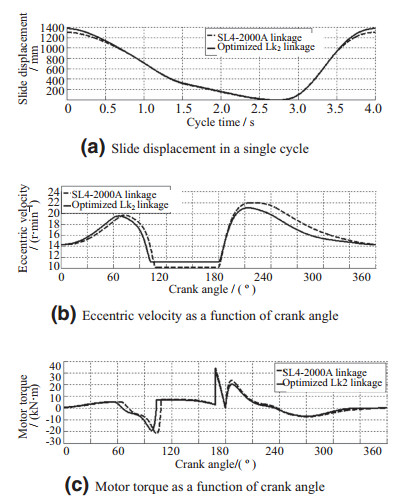
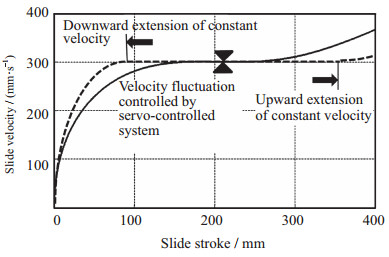
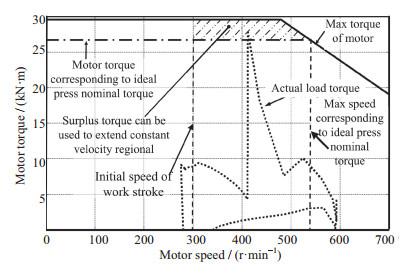
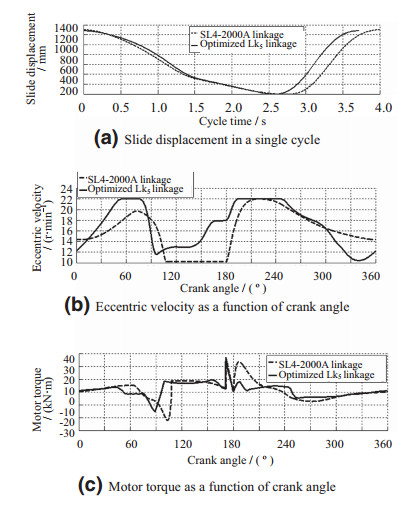
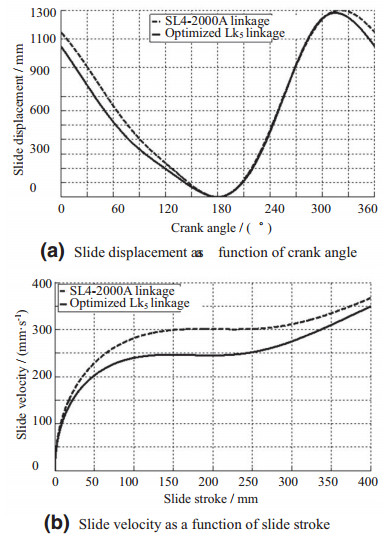
Existing linkage-optimization methods are designed for mechanical presses; few can be directly used for servo presses, so development of the servo press is limited. Based on the complementarity of linkage optimization and motion planning, a phase-division-based linkage-optimization model for a drawing servo press is established. Considering the motion-planning principles of a drawing servo press, and taking account of work rating and efficiency, the constraints of the optimization model are constructed. Linkage is optimized in two modes:use of either constant eccentric speed or constant slide speed in the work segments. The performances of optimized linkages are compared with those of a mature linkage SL4-2000A, which is optimized by a traditional method. The results show that the work rating of a drawing servo press equipped with linkages optimized by this new method improved and the root-mean-square torque of the servo motors is reduced by more than 10%. This research provides a promising method for designing energy-saving drawing servo presses with high work ratings.
Existing linkage-optimization methods are designed for mechanical presses; few can be directly used for servo presses, so development of the servo press is limited. Based on the complementarity of linkage optimization and motion planning, a phase-division-based linkage-optimization model for a drawing servo press is established. Considering the motion-planning principles of a drawing servo press, and taking account of work rating and efficiency, the constraints of the optimization model are constructed. Linkage is optimized in two modes:use of either constant eccentric speed or constant slide speed in the work segments. The performances of optimized linkages are compared with those of a mature linkage SL4-2000A, which is optimized by a traditional method. The results show that the work rating of a drawing servo press equipped with linkages optimized by this new method improved and the root-mean-square torque of the servo motors is reduced by more than 10%. This research provides a promising method for designing energy-saving drawing servo presses with high work ratings.
2017, 30(6): 1438-1446.
doi: 10.1007/s10033-017-0194-1
Abstract:
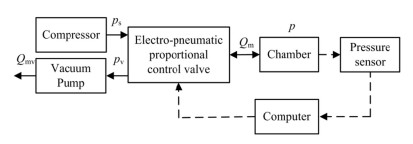
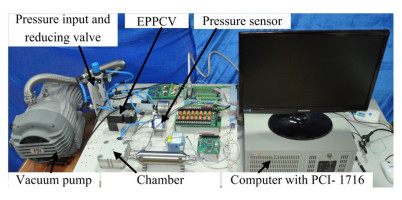
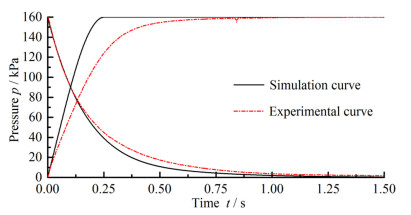
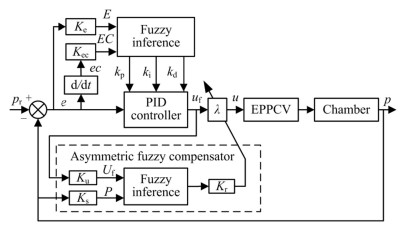
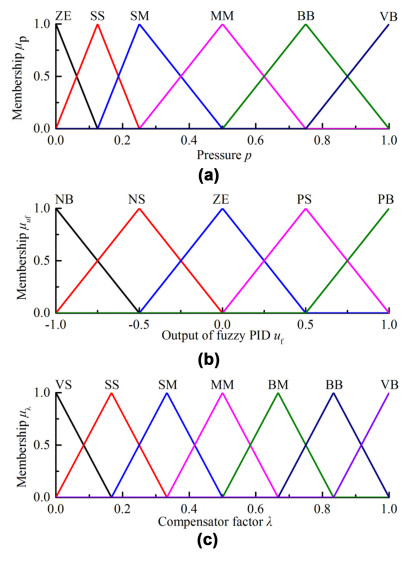
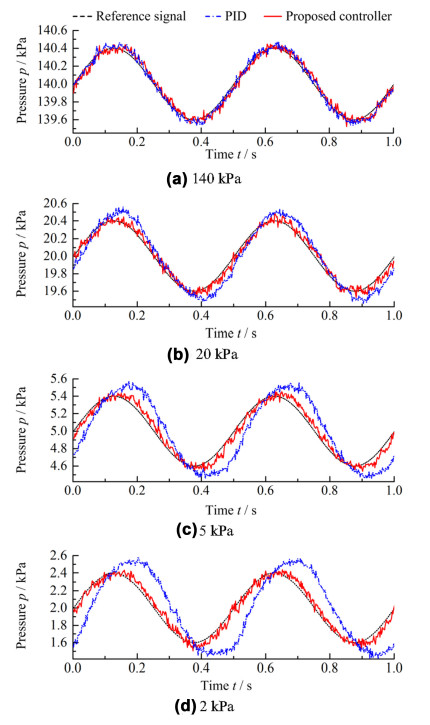
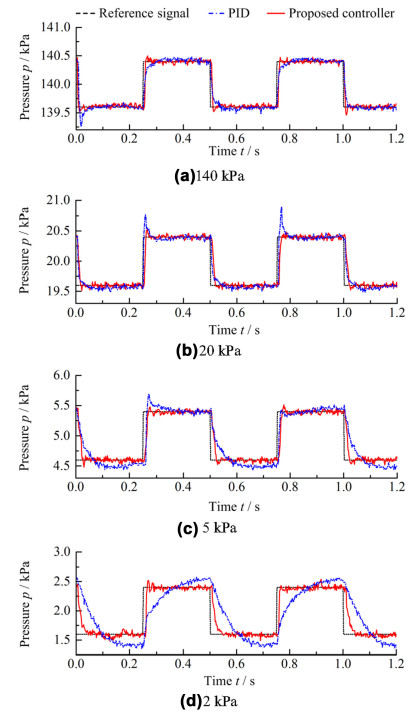
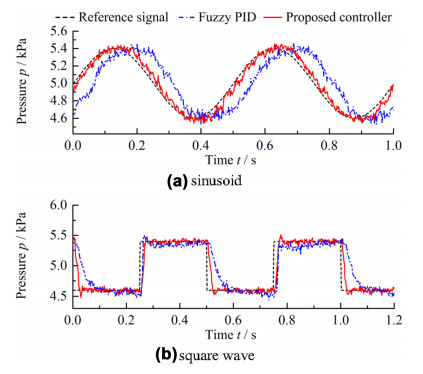
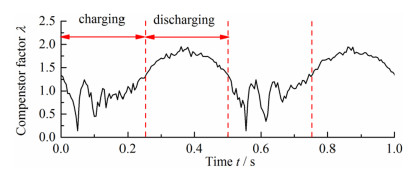
The pneumatic pressure control systems have been used in some fields. However, the researches on pneumatic pressure control mainly focus on constant pressure regulation. Poor dynamic characteristics and strong nonlinearity of such systems limit its application in the field of pressure tracking control. In order to meet the demand of generating dynamic pressure signal in the application of the hardware-in-the-loop simulation of aerospace engineering, a positive and negative pneumatic pressure servo system is provided to implement dynamic adjustment of sealed chamber pressure. A mathematical model is established with simulation and experiment being implemented afterwards to discuss the characteristics of the system, which shows serious asymmetry in the process of charging and discharging. Based on the analysis of the system dynamics, a fuzzy proportional integral derivative (PID) controller with asymmetric fuzzy compensator is proposed. Different from conventional adjusting mechanisms employing the error and change in error of the controlled variable as input parameters, the current chamber pressure and charging or discharging state are chosen as inputs of the compensator, which improves adaptability. To verify the effectiveness and performance of the proposed controller, the comparison experiments tracking sinusoidal and square wave commands are conducted. Experimental results show that the proposed controller can obtain better dynamic performance and relatively consistent control performance across the scope of work (2-140 kPa). The research proposes a fuzzy control method to overcome asymmetry and enhance adaptability for the positive and negative pneumatic pressure servo system.
The pneumatic pressure control systems have been used in some fields. However, the researches on pneumatic pressure control mainly focus on constant pressure regulation. Poor dynamic characteristics and strong nonlinearity of such systems limit its application in the field of pressure tracking control. In order to meet the demand of generating dynamic pressure signal in the application of the hardware-in-the-loop simulation of aerospace engineering, a positive and negative pneumatic pressure servo system is provided to implement dynamic adjustment of sealed chamber pressure. A mathematical model is established with simulation and experiment being implemented afterwards to discuss the characteristics of the system, which shows serious asymmetry in the process of charging and discharging. Based on the analysis of the system dynamics, a fuzzy proportional integral derivative (PID) controller with asymmetric fuzzy compensator is proposed. Different from conventional adjusting mechanisms employing the error and change in error of the controlled variable as input parameters, the current chamber pressure and charging or discharging state are chosen as inputs of the compensator, which improves adaptability. To verify the effectiveness and performance of the proposed controller, the comparison experiments tracking sinusoidal and square wave commands are conducted. Experimental results show that the proposed controller can obtain better dynamic performance and relatively consistent control performance across the scope of work (2-140 kPa). The research proposes a fuzzy control method to overcome asymmetry and enhance adaptability for the positive and negative pneumatic pressure servo system.
2017, 30(6): 1447-1459.
doi: 10.1007/s10033-017-0198-x
Abstract:
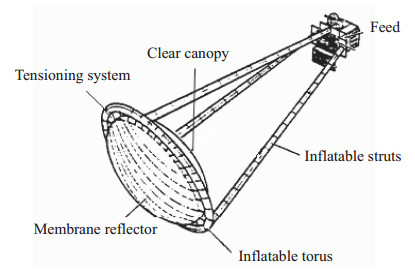
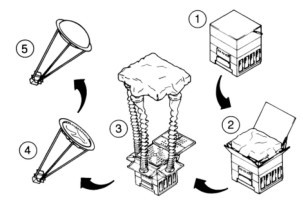
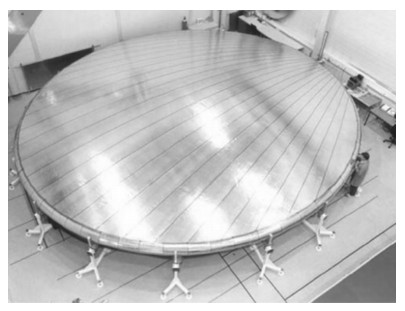
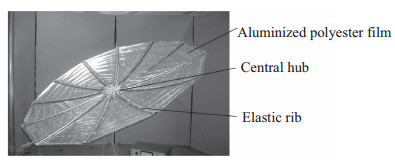
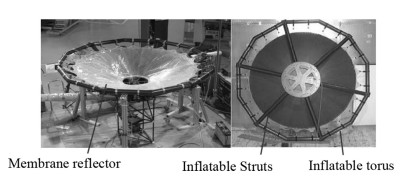
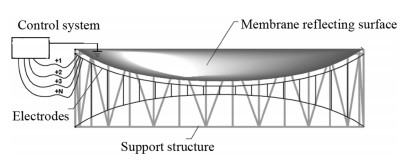
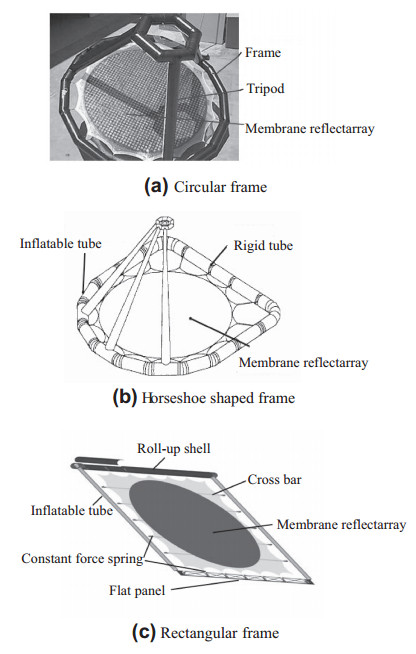
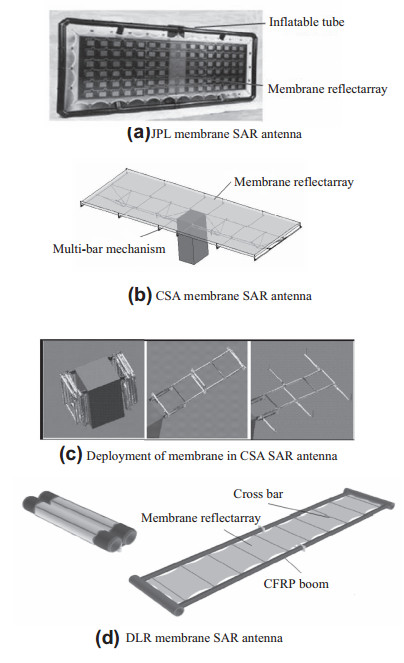
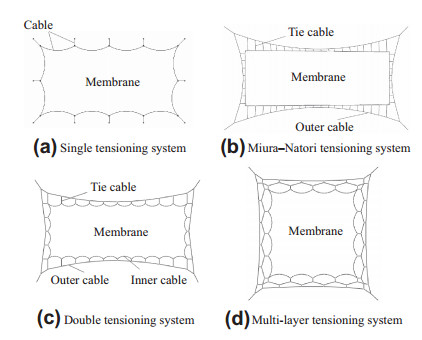
The demand for large antennas in future space missions has increasingly stimulated the development of deployable membrane antenna structures owing to their light weight and small stowage volume. However, there is little literature providing a comprehensive review and comparison of different membrane antenna structures. Space-borne membrane antenna structures are mainly classified as either parabolic or planar membrane antenna structures. For parabolic membrane antenna structures, there are five deploying and forming methods, including inflation, inflation-rigidization, elastic ribs driven, Shape Memory Polymer (SMP)-inflation, and electrostatic forming. The development and detailed comparison of these five methods are presented. Then, properties of membrane materials (including polyester film and polyimide film) for parabolic membrane antennas are compared. Additionally, for planar membrane antenna structures, frame shapes have changed from circular to rectangular, and different tensioning systems have emerged successively, including single Miura-Natori, double, and multi-layer tensioning systems. Recent advances in structural configurations, tensioning system design, and dynamic analysis for planar membrane antenna structures are investigated. Finally, future trends for large space membrane antenna structures are pointed out and technical problems are proposed, including design and analysis of membrane structures, materials and processes, membrane packing, surface accuracy stability, and test and verification technology. Through a review of large deployable membrane antenna structures, guidance for space membrane-antenna research and applications is provided.
The demand for large antennas in future space missions has increasingly stimulated the development of deployable membrane antenna structures owing to their light weight and small stowage volume. However, there is little literature providing a comprehensive review and comparison of different membrane antenna structures. Space-borne membrane antenna structures are mainly classified as either parabolic or planar membrane antenna structures. For parabolic membrane antenna structures, there are five deploying and forming methods, including inflation, inflation-rigidization, elastic ribs driven, Shape Memory Polymer (SMP)-inflation, and electrostatic forming. The development and detailed comparison of these five methods are presented. Then, properties of membrane materials (including polyester film and polyimide film) for parabolic membrane antennas are compared. Additionally, for planar membrane antenna structures, frame shapes have changed from circular to rectangular, and different tensioning systems have emerged successively, including single Miura-Natori, double, and multi-layer tensioning systems. Recent advances in structural configurations, tensioning system design, and dynamic analysis for planar membrane antenna structures are investigated. Finally, future trends for large space membrane antenna structures are pointed out and technical problems are proposed, including design and analysis of membrane structures, materials and processes, membrane packing, surface accuracy stability, and test and verification technology. Through a review of large deployable membrane antenna structures, guidance for space membrane-antenna research and applications is provided.
2017, 30(6): 1460-1472.
doi: 10.1007/s10033-017-0199-9
Abstract:
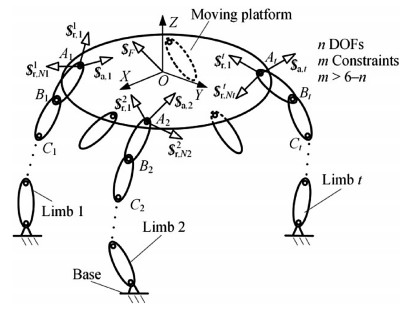
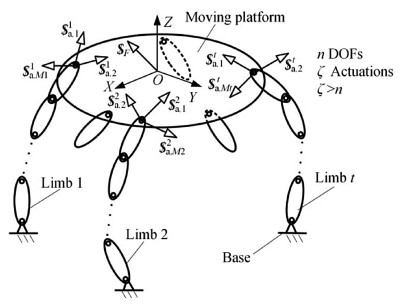
The force analysis of overconstrained PMs is relatively complex and difficult, for which the methods have always been a research hotspot. However, few literatures analyze the characteristics and application scopes of the various methods, which is not convenient for researchers and engineers to master and adopt them properly. A review of the methods for force analysis of both passive and active overconstrained PMs is presented. The existing force analysis methods for these two kinds of overconstrained PMs are classified according to their main ideas. Each category is briefly demonstrated and evaluated from such aspects as the calculation amount, the comprehensiveness of considering limbs' deformation, and the existence of explicit expressions of the solutions, which provides an important reference for researchers and engineers to quickly find a suitable method. The similarities and differences between the statically indeterminate problem of passive overconstrained PMs and that of active overconstrained PMs are discussed, and a universal method for these two kinds of overconstrained PMs is pointed out. The existing deficiencies and development directions of the force analysis methods for overconstrained systems are indicated based on the overview.
The force analysis of overconstrained PMs is relatively complex and difficult, for which the methods have always been a research hotspot. However, few literatures analyze the characteristics and application scopes of the various methods, which is not convenient for researchers and engineers to master and adopt them properly. A review of the methods for force analysis of both passive and active overconstrained PMs is presented. The existing force analysis methods for these two kinds of overconstrained PMs are classified according to their main ideas. Each category is briefly demonstrated and evaluated from such aspects as the calculation amount, the comprehensiveness of considering limbs' deformation, and the existence of explicit expressions of the solutions, which provides an important reference for researchers and engineers to quickly find a suitable method. The similarities and differences between the statically indeterminate problem of passive overconstrained PMs and that of active overconstrained PMs are discussed, and a universal method for these two kinds of overconstrained PMs is pointed out. The existing deficiencies and development directions of the force analysis methods for overconstrained systems are indicated based on the overview.

 E-mail Alerts
E-mail Alerts
